Reference
Setting and
Adjustment
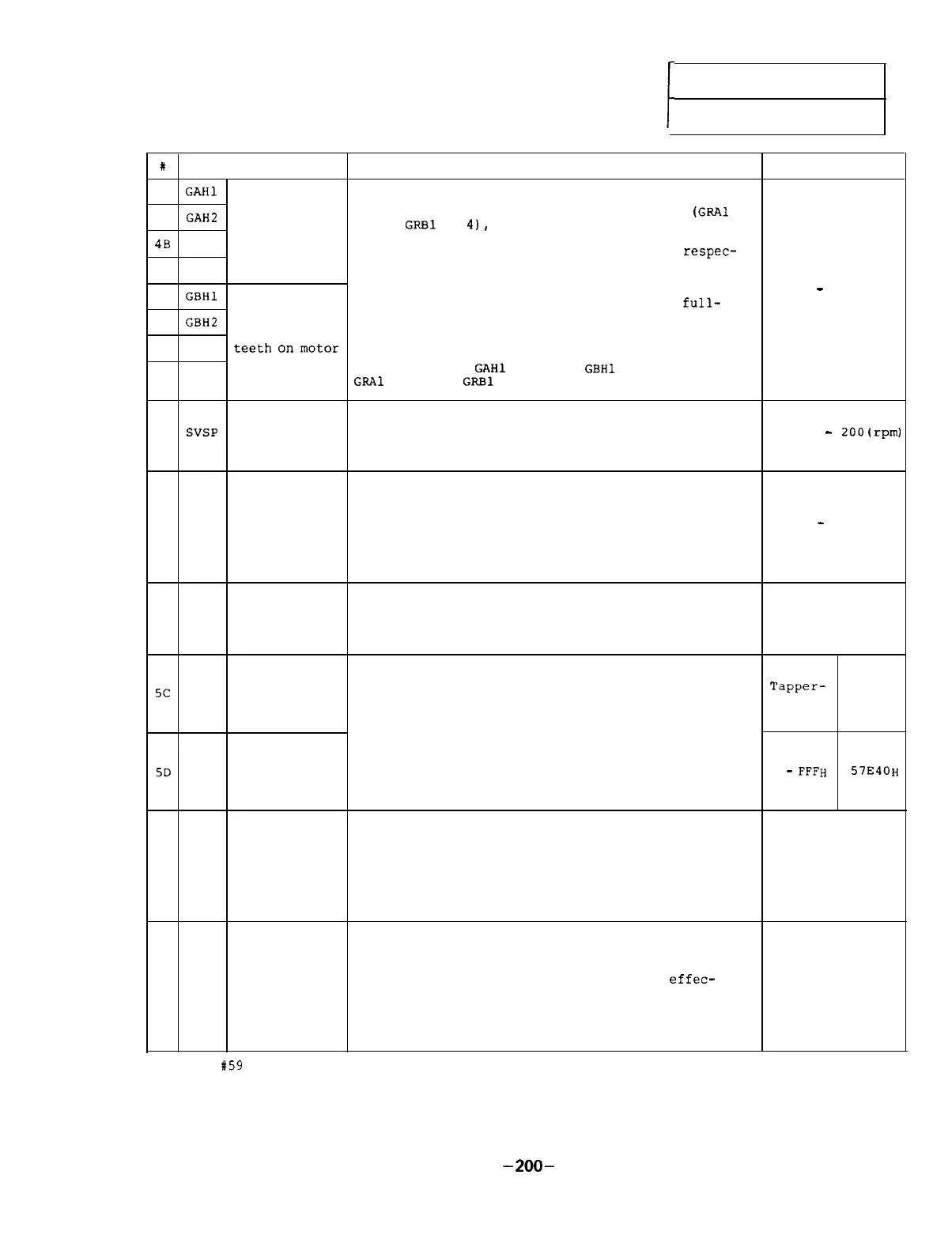
1.2 Setting parameter
#
Parameter Description
Setting range
(Unit)
49
GAHl
When the number of gear teeth exceeds the setting
4A
GAH2
Number of
range of the normal gear teeth parameters
(GRAl
to
auxiliary gear 4 and
GRBl
to
41,
assuming that the number of gear
40
GAH3
teeth on spin- teeth is X x Y, X and Y are set to the gear teeth
dle side
parameter and auxiliary teeth parameter,
respec-
4C GAH4
tively.
However, the number of auxiliary gear teeth is
4D
GBHl
set in the semi-close position loop state which
1
-
7FFF
requires the precise gear ratio.
In the
full-
(Hexadecimal)
4E
GBH2
Number of
close position loop state,
a proximity value which
auxiliary gear
satisfies the normal gear teeth parameter is set
4F GBH3
teeth
on
motor
and the number of auxiliary gear teeth is set to
side
0.
The parameters
GAHl
to 4 and
GBHl
to 4 accord with
50 GBH4
GP.Al
to 4 and
GRBl
to 4, respectively.
.
Servo shift
The spindle speed on which the speed loop is
59
SVSP
speed
switched to the position loop is set.
10
-
200(rpm)
Standard setting: 40
The deceleration point on which the spindle speed
Zero return
is decelerated from the servo traveling speed to
5A PDT
deceleration
the stop point is set.
If the spindle overruns
point
when it stops, this parameter value should be
1
-
2000
increased.
(pulse)
Standard setting: 88
Position loop
The range for which the position loop in-position
5B IPOS
in-position is output is set.
Hexadecimal
range
Standard setting: Frequency tap 10
Position loop
PZSF
5c
L
zero return
Tapper-
shift amount
less
Axis C
(Low Byte)
The shift amount from the phase Z at the zero
return position on which the speed loop is
switched to the position loop is set.
Position loop
PZSF
5D
H
zero return
Standard setting: 0
shift amount
0
-
FFFB
57E4OB
(High Byte)
This parameter serves to cushion the amount of
change of the speed reference.
5E DCSN
Dual
Of Invalid 1: Valid
cushion
Decimal notation
It suppresses gear noise during speed change
operation.
Standard setting: 1
The excitation ratio is set.
When the gear noise is large, a small value is
selected for this parameter.
However, for the
5F PYX
Excitation impact load response,
a large value is
effec-
ratio
tive.
Standard setting: 0
0: 50%
1: 25% 2: 75%
3: 100%
(Note)
#59
to 5D are parameters which are used in the synchronous tap state.
-2oo-

 Loading...
Loading...