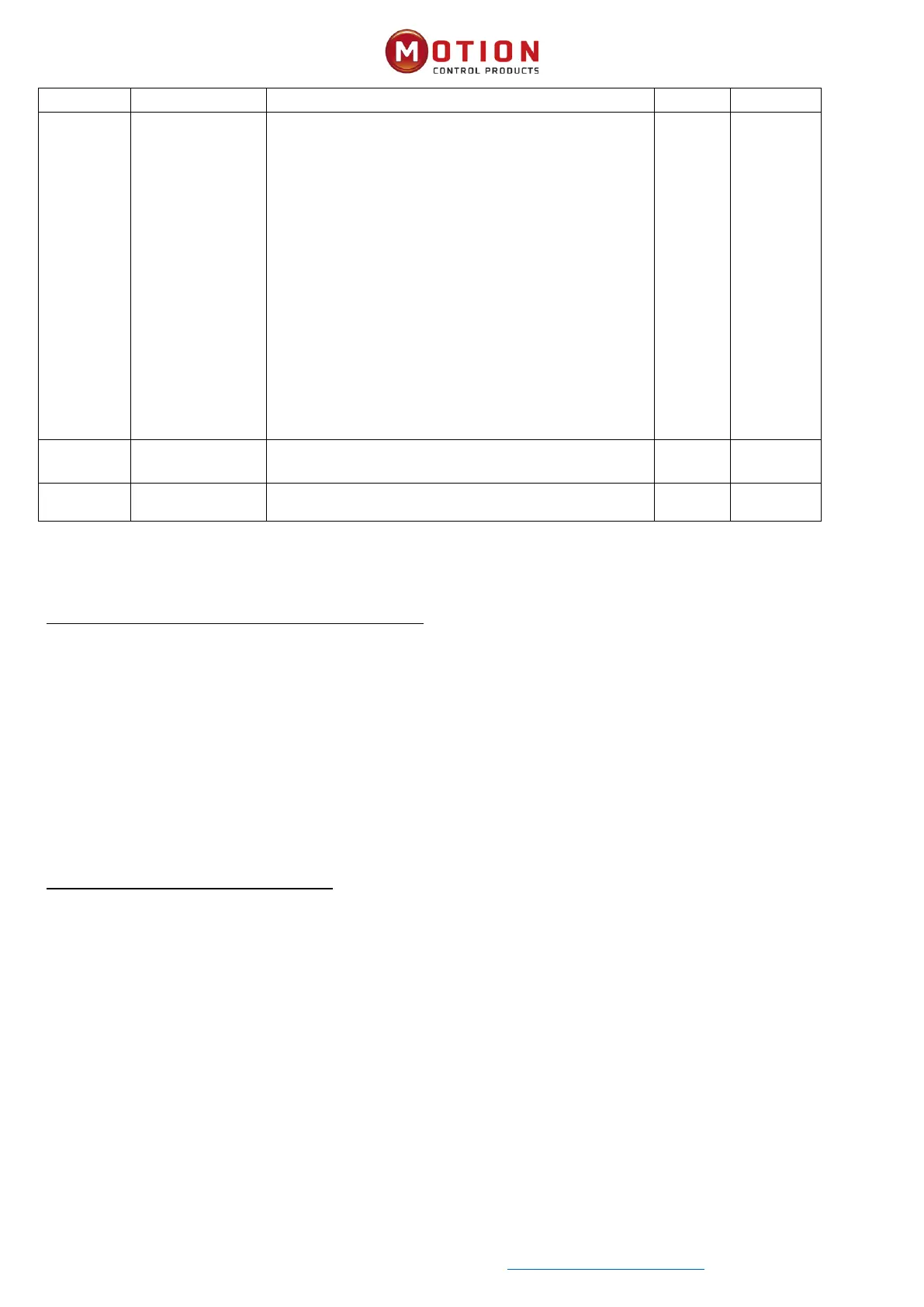
0: 2nd order FB LPF
1: Directly feedback the original velocity
2: Velocity feedback aer velocity observer
4: Velocity feedback aer 1st order LPF
10: Velocity feedback aer 2nd order LPF and the
velocity command is ltered by a 1st order LPF. Both
lters have the same bandwidth. 11: The velocity
command is ltered by a 1st order LPF
12: Velocity feedback aer velocity observer, the
velocity command is ltered by a 1st order LPF
14: Velocity feedback aer 1st order LPF and the
velocity command is ltered by a 1st order LPF. Both
lters have the same bandwidth
Step of velocity loop tuning is shown below:
Step 1: Conrm the limit of the velocity loop bandwidth
Velocity loop bandwidth limits posion loop bandwidth, so it is especially important to adjust speed loop bandwidth.
The limit of the velocity ring bandwidth can be determined by several aspects:
⚫ Feel the motor vibraon and noise through your ngers and ears. It is actually an empirical story, but it's very
valid. Users can choose to increase or decrease the velocity loop bandwidth by listening and touching the
machine.
⚫ Another way is to observe the oscilloscope, where the user generates a step curve for velocity control and
samples the actual velocity and current. Comparing the sampling paerns at dierent velocity loop
bandwidths, we can nd the opmal curve – the velocity curve follows the command quickly and without
oscillaons.
Step 2: Velocity feedback lter adjustment
The velocity feedback lter can reduce noise that comes from the feedback path, e.g. reduce encoder resoluon noise.
The velocity feedback lter can be congured as 1st and 2nd order via the Speed_Mode for dierent applicaons.
The 1st order lter reduces noise to a lesser extent, but it also results in less phase shiing so that velocity loop gain
can be set higher.
The 2nd order lter reduces noise to a greater extent, but it also results in more phase shiing so that velocity loop
gain can be limited.
Normally, if the machine is s and light, we can use the 1st feedback lter or disable the feedback lter. If the machine
is so and heavy, we can use the 2nd order lter.
 Loading...
Loading...