Moon Control Products Ltd. Tel.: +44 (0)1202 599922 www.mooncontrolproducts.com Page | 33
Chapter 6 RS485 Communicaon
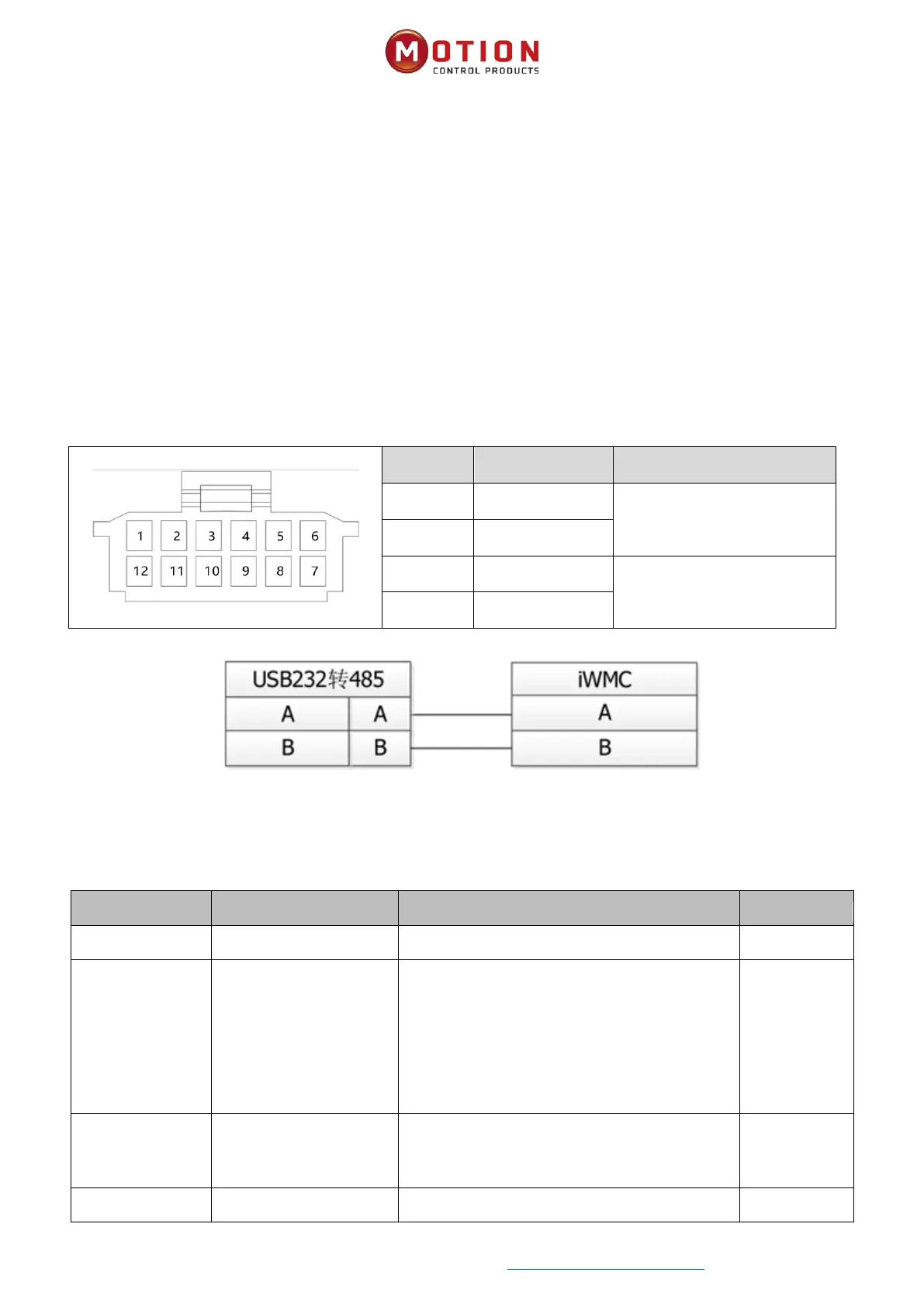
6.1 RS485 Wiring
iWMC integrated servo wheel RS485 port defaults to servo debugging port, and the protocol is RS232 format.
If you need to use the MODBUS communicaon funcon to communicate with the PLC, please modify the address of
65100C08 to 0.
When using RS485 for communicaon control with PLC, please use a CAN card to connect to the Kinco Servo+ soware
debugging servo.
Table 6-1 RS485 Terminal descripon
0: Use the Modbus protocol
1: Use RS232 protocol
Note: It needs to be set to 0, save and restart.