Moon Control Products Ltd. Tel.: +44 (0)1202 599922 www.mooncontrolproducts.com Page | 37
Chapter7 CANOpen Communicaon
7.1 CANOpen bus communicaon
CANOpen is one of the most famous and successful open eldbus standards. It has been widely recognised and applied a
lot in Europe and USA. In 1992, CiA (CANinAutomaon) was set up in Germany, and began to develop applicaon layer
protocol CANOpen for CAN in automaon. Since then, members of CiA developed a series of CANOpen products, and
applied in many applicaons in the eld of machinery manufacturing such as railway, vehicles, ships, pharmaceucal and
food processing etc.
The servo wheel is a standard CAN slave device that strictly follows the CANOpen2.0A/B protocol, and any host computer
that supports this protocol can communicate with it. The servo uses a strictly dened object list, which we call the object
diconary, which is designed in a way that is based on the CANOpen internaonal standard, and all objects have clear
funconal denions. Some objects such as velocity and posion can be modied by external controllers, and some
objects can only be modied by the drive itself, such as status and error messages. Examples of these objects are shown in
Table 10-5.
Table 7-1 Object diconary example list
The aributes of objects are as follows:
1. RW (read & write): The object can be both read and wrien;
2. RO (read only): The object can be read only;
3. WO (write only): The object can be wrien only;
4. M (map): The object can be mapping, similar to indirect addressing;
5. S (save): The object can be stored in Flash-ROM without lost aer power failure.
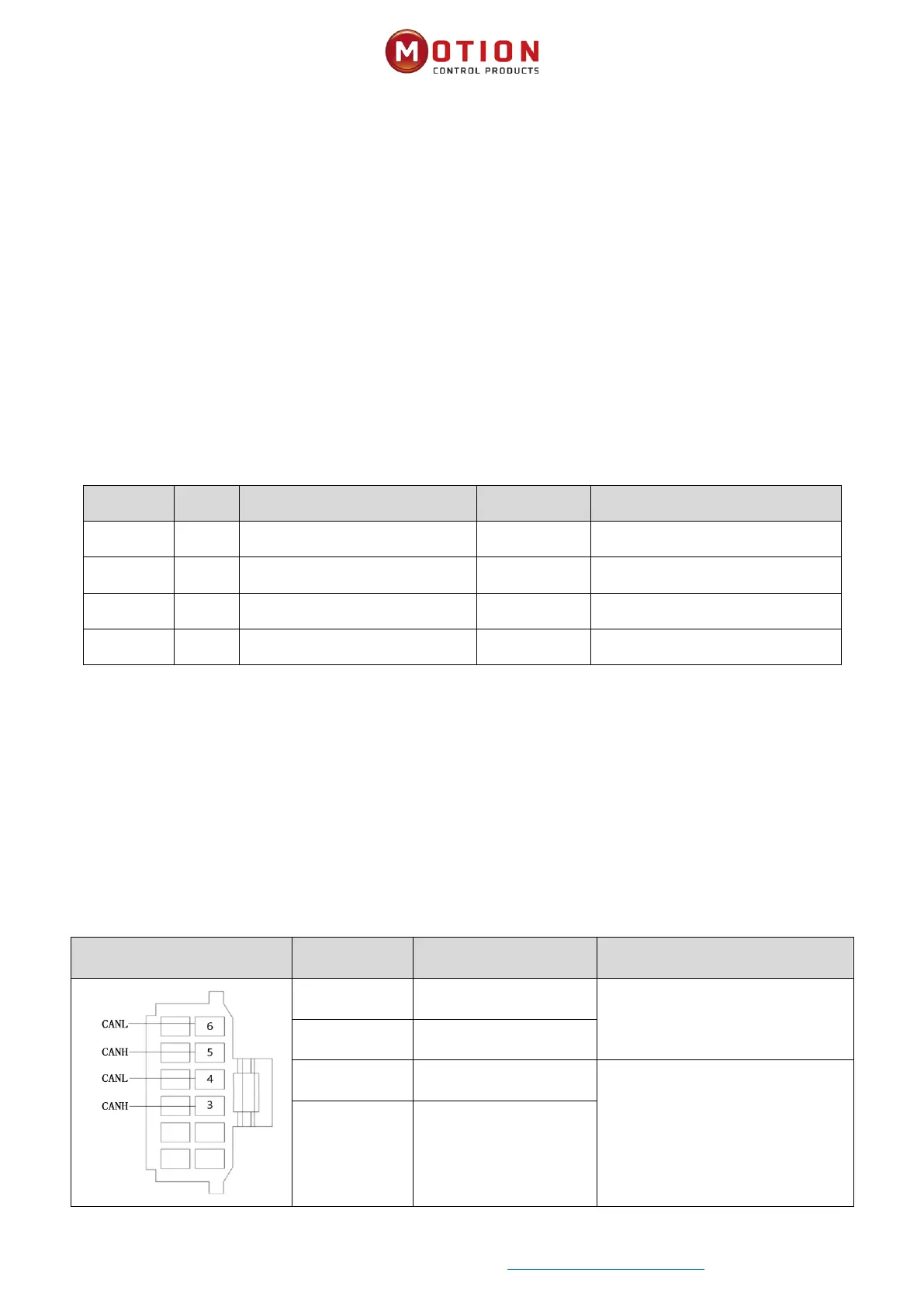
7.2 CANOpen Bus Communicaon Hardware
Table 7-2 Pin name and funcon descripon table