INTRODUCTION
SpotWelding Manual for Medar 1-2
MOTO
MAN
1.2 System Configuration
A spot welding system is an integrated package of tools and components designed
to meet specific welding requirements. A typical system includes the components
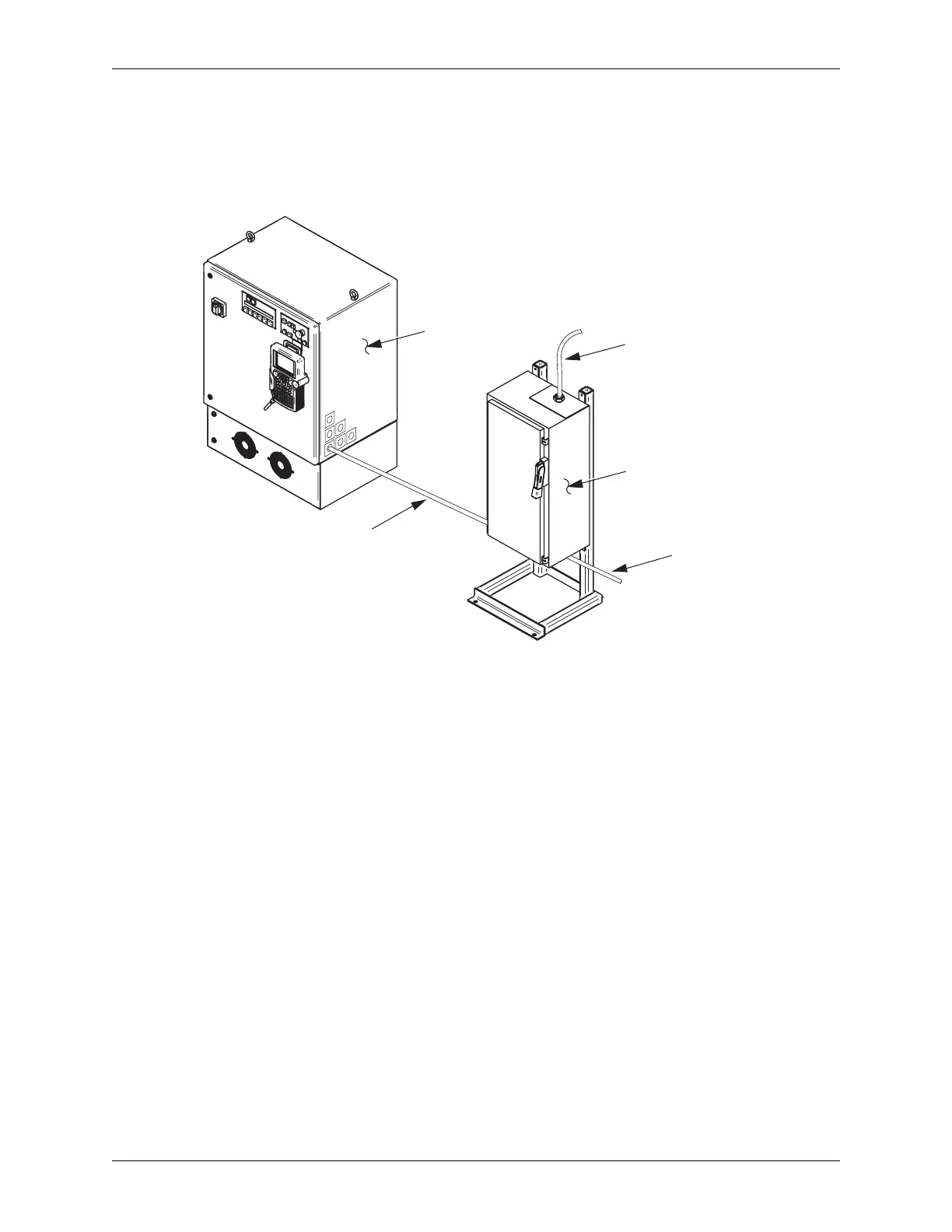
and optional equipment listed below. Figure 1-1 shows a typical system
configuration.
Figure 1-1 XRC and Medar Integrated Weld Control
• Motoman robot manipulator and XRC 2001 controller
• 3-Slot CPU rack
• Medar integrated welding board
• Welding equipment, including the following:
• Medar 3006 integrated weld control
• MedWeld cable
• Transgun (air or servo-driven)
• Water circulator/chiller
Options for the welding system include:
• Tip dresser
• Tip changer
The XRC controls the operation of the spot welding system. It coordinates the
operation of the various components of the system through execution of instruction
sequences provided in the robot program or “job” file. As the XRC steps through
the series of instructions, it directs the movement of the robot and operates the
weld control.
XRC ROBOT
CONTROLLER
MEDAR
WELD CONTROL
INCOMING POWER
(CUSTOMER–SUPPLIED)
XRC TO MEDAR
INTERFACE CABLE
OUTGOING POWE
TO TRANSGUN
 Loading...
Loading...




