14
Temposonics
®
R-Series SSI
Operation Manual
Temposonics
®
R-Series SSI
Operation Manual
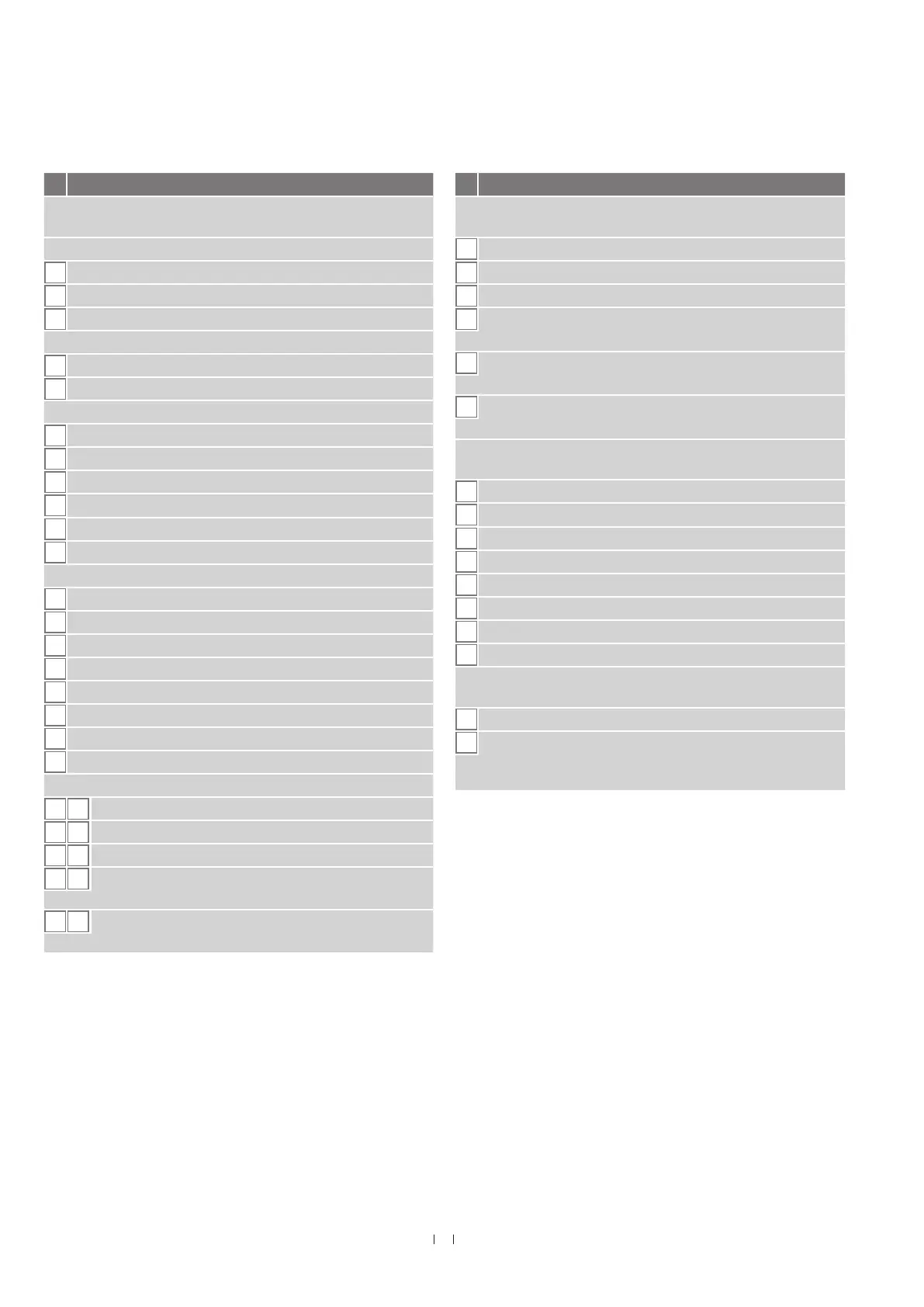
f Output (continued)
Measurement contents (optional: box no. 21)
Note: Choose “9” in box no. 19 and 20.
1
Position measurement
2
Differentiation measurement
11
3
Velocity measurement
4
Position measurement + temperature measurement
(only with data length = 24 bit)
5
Differentiation measurement
11
+ temperature measurement
(only with data length = 24 bit)
6
Velocity measurement + temperature measurement
(only with data length = 24 bit)
Direction and sync. mode (optional: box no. 22)
Note: Choose “9” in box no. 19 and 20.
1
Measuring direction forward, asynchronous mode
2
Measuring direction forward, synchronous mode 1
3
Measuring direction forward, synchronous mode 2
4
Measuring direction forward, synchronous mode 3
5
Measuring direction reverse, asynchronous mode
6
Measuring direction reverse, synchronous mode 1
7
Measuring direction reverse, synchronous mode 2
8
Measuring direction reverse, synchronous mode 3
Diagnostics (optional: box no. 23)
Note: Choose “9” in box no. 19 and 20.
0
No further options
2
Additional alarm bit + parity even bit
(not available for temperature output, only with data length =
24 bit)
11/ You need a second magnet for differentiation measurement
Signal options (box no. 19, 20)
0 0
Measuring direction forward, asynchronous mode
0 1
Measuring direction reverse, asynchronous mode
0 2
Measuring direction forward, synchronous mode 1
0
5
Measuring direction forward, asynchronous mode,
bit 25 = alarm, bit 26 = parity even
9 9
Write “9” in box no. 19 and 20 for using further
combinations in boxes 21, 22, 23.
f Output
S (15) (16) (17) (18) (19) (20) (21) (22) (23)
= Synchronous Serial Interface
Data length (box no. 15)
1
25 bit
2
24 bit
3
26 bit
Output format (box no. 16)
B
Binary
G
Gray
Resolution (box no. 17)
1
0.005 mm
2
0.01 mm
3
0.05 mm
4
0.1 mm
5
0.02 mm
6
0.002 mm
Filtering performance (box no. 18)
A
No filter + error delay (4 cycles)
C
No filter + error delay (8 cycles)
1
Standard (no filters)
8
Noise reduction filter (8 measurements)
D
No filter + error delay (10 cycles)
G
Noise reduction filter (8 measurements) + error delay (10 cycles)
K
Peak reduction filter (8 measurements)
N
Peak reduction filter (8 measurements) + error delay (10 cycles)

 Loading...
Loading...