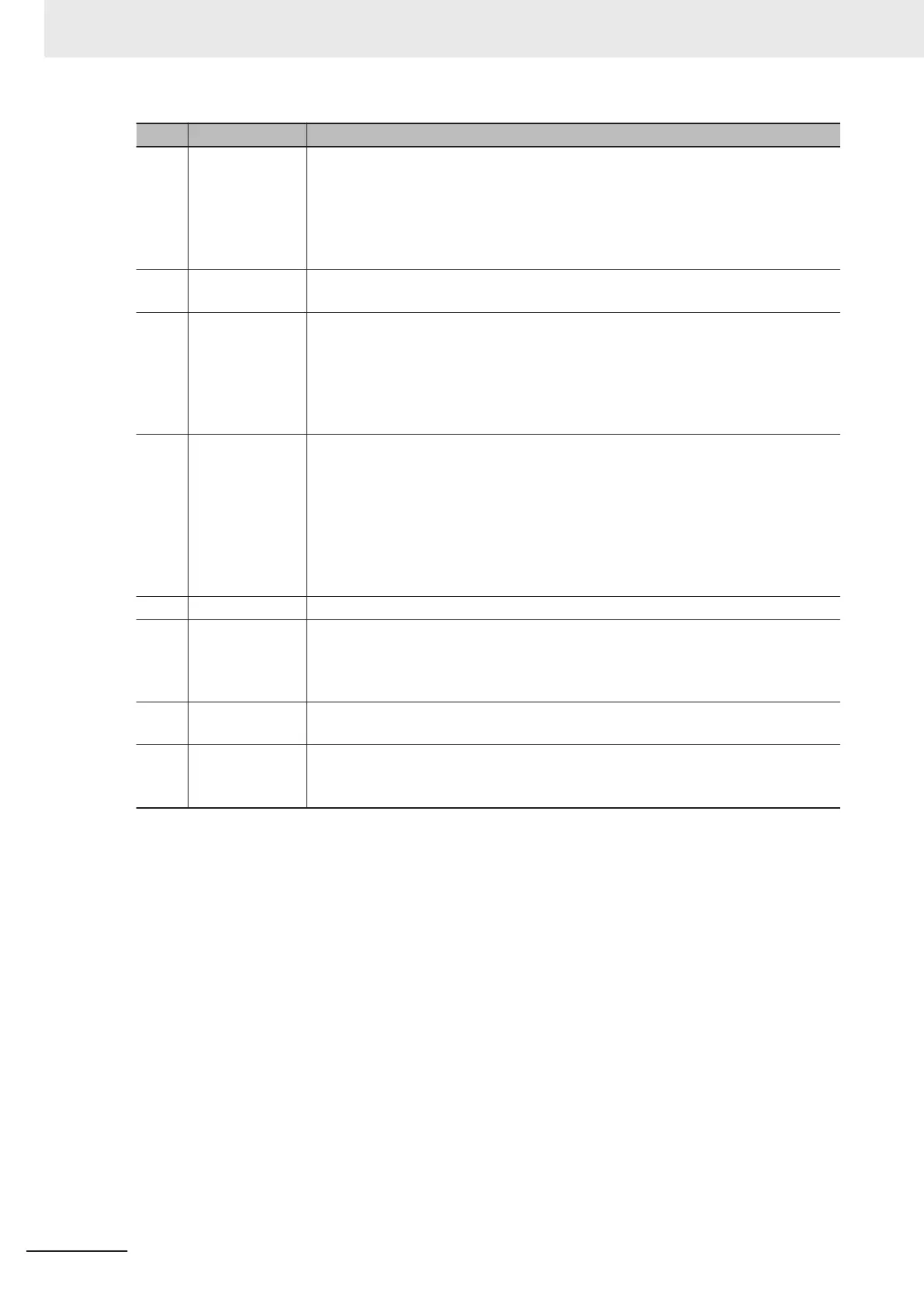
Bit Name Function
21 to
16
Com-
mand_Code
Set the Command Code to send to the Endat encoder.
This product supports the following four Command Codes.
00011
1 – Position data read
101010 – Encoder reset
111000 – Position data and additional data read
101101 – Position data and additional data read, encoder reset
15 to
14
Reserve Always set 0.
13 SerialEncTrig-
Mode
Serial trigger mode (continuous or one-shot) setting
Set whether to sample the encoder repeatedly or sample it only once.
For continuous sampling, it is sampled for each clock (phase or servo) to be set us-
ing Gate3[i].SerialEncCtrl.
0: Continuous sampling
1: One-shot sampling
12 SerialEncTrigE-
na
Serial trigger enable
Set whether to sample the encoder
.
When SerialEncT
rigMode is continuous sampling, it is sampled continuously during
SerialEncTrigEna = 1.
When SerialEncTrigMode is one-shot sampling, it is sampled only once at Serial-
EncTrigEna = 1. When sampling is done, SerialEncTrigEna will be 0 automatically.
0: Serial encoder trigger disable
1: Serial encoder trigger enable
11 Reserve Always set 0.
10 SerialEncData-
Ready
Serial reception status read
0: Reception in progress
1: Reception done
This bit is read-only and writing is disabled.
09 to
06
Reserve Always set 0.
05 to
00
SerialEncNum-
Bits
Number of encoder data bits setting
Set the number of bits of the position data to be sent from the encoder
.
The valid setting range is from 12 to 40 (001
100 to 101000).
The following shows examples of general settings.
MRS Code: = 0000000 // Additional data not set
Command Code: = 000111 // Position data read
SerialEncTrigMode: = 0 // Continuous sampling
SerialEncTrigEna: = 1 // Serial encoder trigger enable
SerialEncDataReady: = 0 // Read-only and writing is disable
SerialEncStatusBits: = Depending on encoder // Set according to encoder specific
ations
SerialEncNumBits: = Depending on encoder // Set according to encoder specific
ations
Appendices
A-26
CK3M-series Programmable Multi-Axis Controller User's Manual Hardware (O036)

 Loading...
Loading...






