Default $00000000
Depending on the channel, this setting varies as follows.
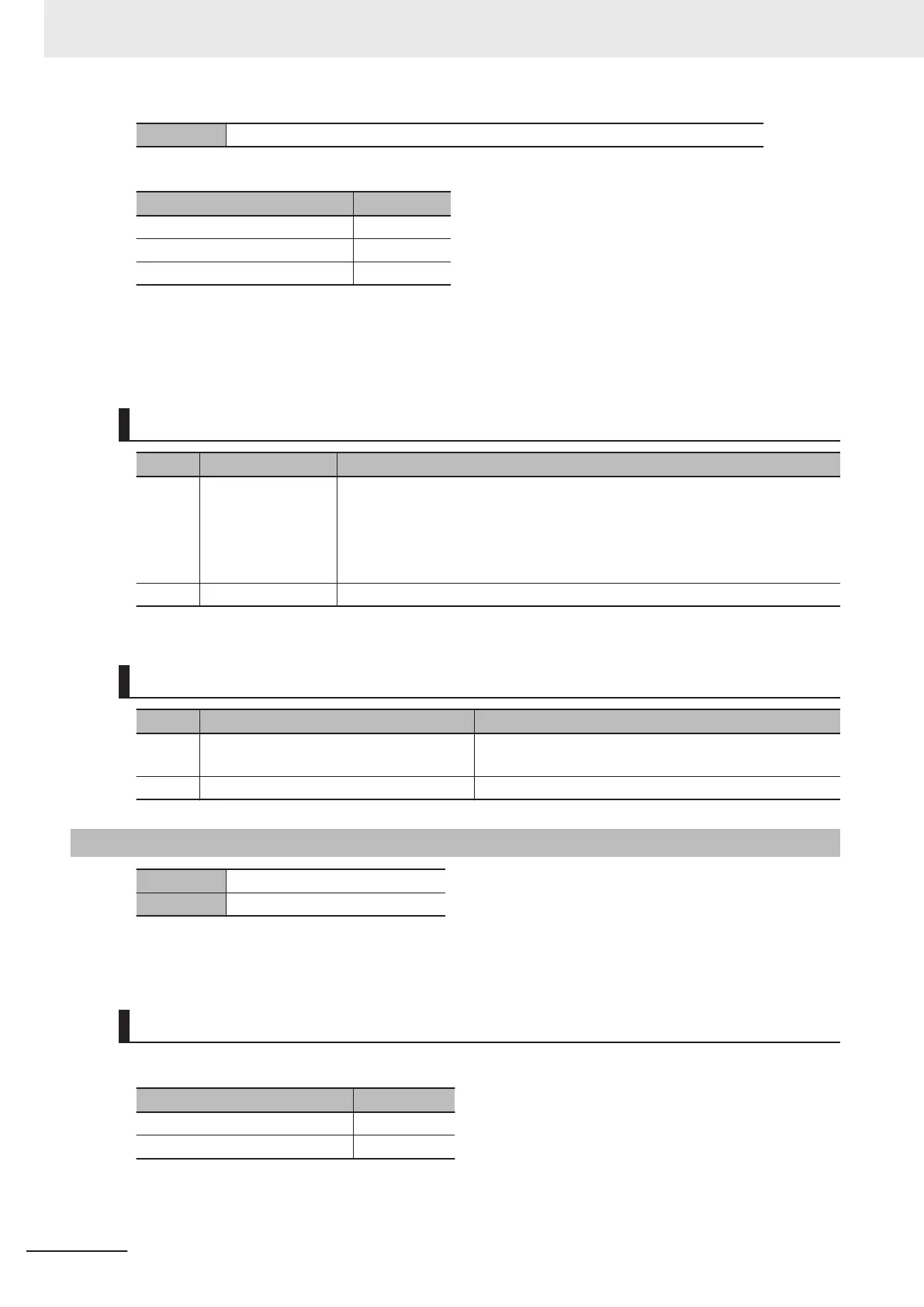
Register Description
Gate3[i].Chan[0].SerialEncDataA X-axis setting
Gate3[i].Chan[1].SerialEncDataA Y-axis setting
Gate3[i].Chan[2].SerialEncDataA Z-axis setting
Note
Gate3[i].Chan[3].SerialEncDataA is not used.
This register is read-only. Writing is disabled.
The setting of this register depends on XY2-100 and SL2-100.
For CK3W-GC1£00 Units (XY2-100)
Bit Name Function
31 to 08 Command position
after linear interpo-
lation
Stores the command position data that was applied linear interpolation.
*1
The command position data that was applied linear interpolation is refreshed
every 10 µs.
This data is the value before a compensation of command position is made.
Data format is determined by ModeSel.
07 to 00 Reserve Always set 0.
*1. Stores the data before a compensation of command position is made.
For CK3W-GC2£00 Units (SL2-100)
Bit Name Function
31 to 08 Reception data based on control com-
mand
Receives the reception data set by the control command.
07 to 00 Reserve Always set 0.
A-9-5
Gate3[i].Chan[j].SerialEncDataB (Status Data)
Description Status data of the Galvo Scanner
Default $00000000
This register is read-only. Writing is disabled.
The setting of this register depends on XY2-100 and SL2-100.
For CK3W-GC1£00 Units (XY2-100)
Depending on the channel, this setting varies as follows.
Register Description
Gate3[i].Chan[0].SerialEncDataB XY-axis status
Gate3[i].Chan[2].SerialEncDataB Z-axis status
Note
Gate3[i].Chan[1].SerialEncDataB and Gate3[i].Chan[3].SerialEncDataB are not used.
Appendices
A-36
CK3M-series Programmable Multi-Axis Controller User's Manual Hardware (O036)

 Loading...
Loading...






