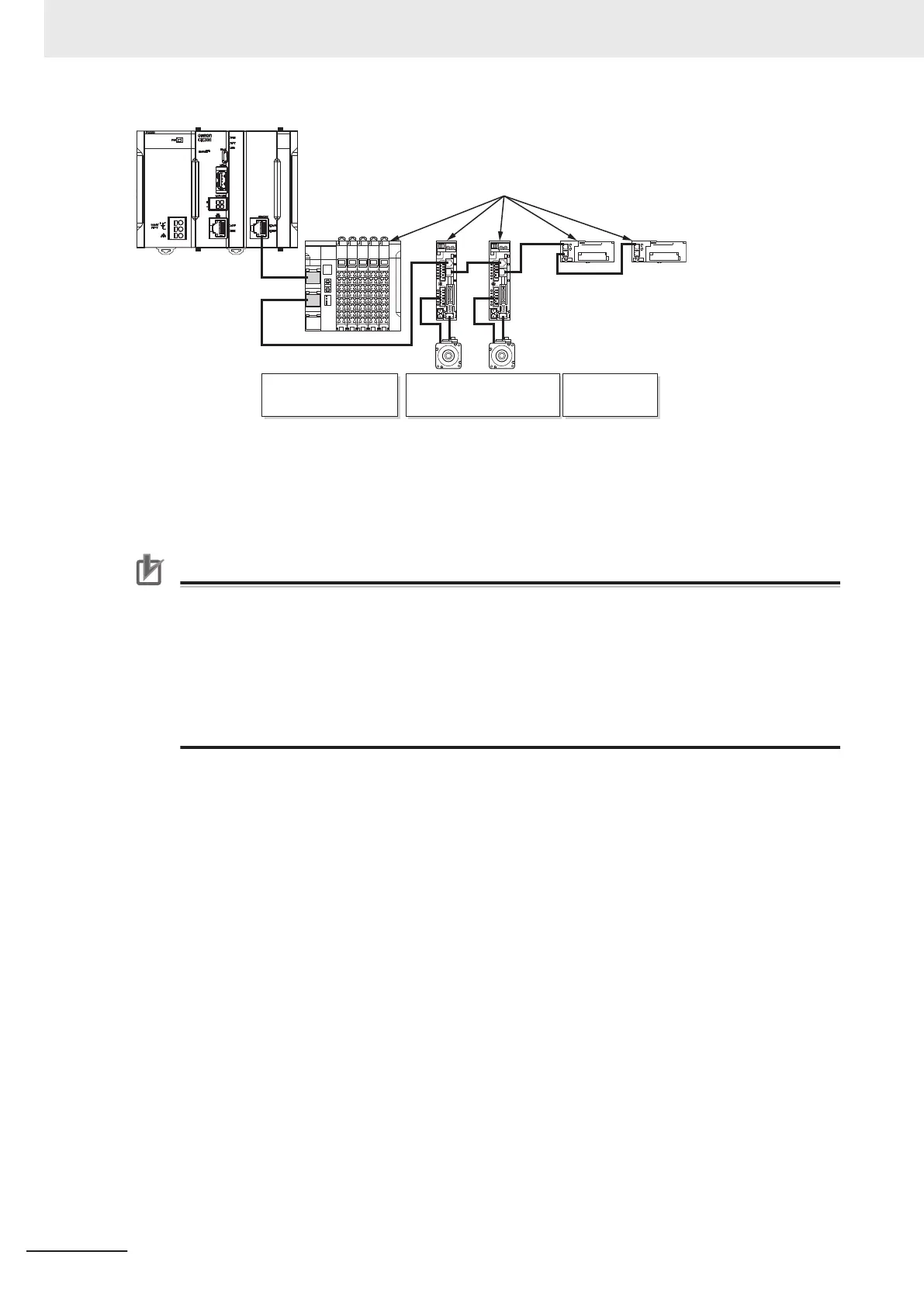
Slave terminal
EtherCA
T slaves
Servo drive/
Encoder input slaves
General-
purpose
slaves
EtherCAT is synchronized with the servo cycle of the CK3M-series CPU Unit. This enables acquisition
of the I/O data of slave terminals that are synchronized with the servo cycle.
Refer to A-3 Restrictions on Using the NX-series EtherCAT Coupler Unit on page
A-10 for information
on using the NX-series EtherCAT Coupler Unit.
Precautions for Correct Use
• Before you connect a slave from another manufacturer, refer to the relevant manual and be
sure to check its operation.
• EtherCA
T setup software that is provided by other manufacturers cannot be connected to
CK3M-series CPU Units.
• When you use the CK3W-GC Unit, select Bus Shift (Reference Clock controlled by
EtherCAT Master Time) for the Distributed Clock setting of EtherCAT.
If you select Master Shift (EtherCAT Master Time controlled by Reference Clock), the
Galvo Scanner and the TCR function may not operate as intended.
2 System Configuration
2-4
CK3M-series Programmable Multi-Axis Controller User's Manual Hardware (O036)

 Loading...
Loading...






