Parameter Details
12
12.7 H: TERMINALS
SIEPYEUOQ2A01A AC Drive Q2A Technical Manual 719
Figure 12.101 Output Voltage Bias through Analog Input
■ 7: TorqCompensation
Setting Function Description
7 TorqCompensation
Enters the torque compensation value if the motor rated torque is 100%.
■ 8: TorqRef/Lim
Setting Function Description
8 TorqRef/Lim
Enters the torque reference if the motor rated torque is 100%. This setting is the torque limit for speed control.
Note:
When you use L7-01 to L7-04 and analog inputs to set torque limits for the same quadrant, it will enable the lower torque limit.
■ 9: FW Trq Lim
Setting Function Description
9 FW Trq Lim
Enters the forward torque limit if the motor rated torque is 100%.
WARNING! Sudden Movement Hazard. Set correct torque limits for applications, for example elevator applications. If you set
torque limits incorrectly, motor torque that is not sufficient can cause damage to equipment and cause serious injury or death.
Torque Limit Configuration Method
Use one of these methods to set torque limits:
• Use L7-01 to L7-04 [FW Torque Limit to RV Reg. TrqLimit] to set each of the 4 torque limit quadrants.
• Use MFAIs to set each of the 4 torque limit quadrants. Set H3-02, H3-06, or H3-10 [MFAI Function Select] to
9, B, or C [FW Trq Lim, Rev Trq Lim, RegenTrqLim].
• Use MFAIs to set all 4 torque limit quadrants at one time. Set H3-02, H3-06, or H3-10 to D [GenerTrqLim].
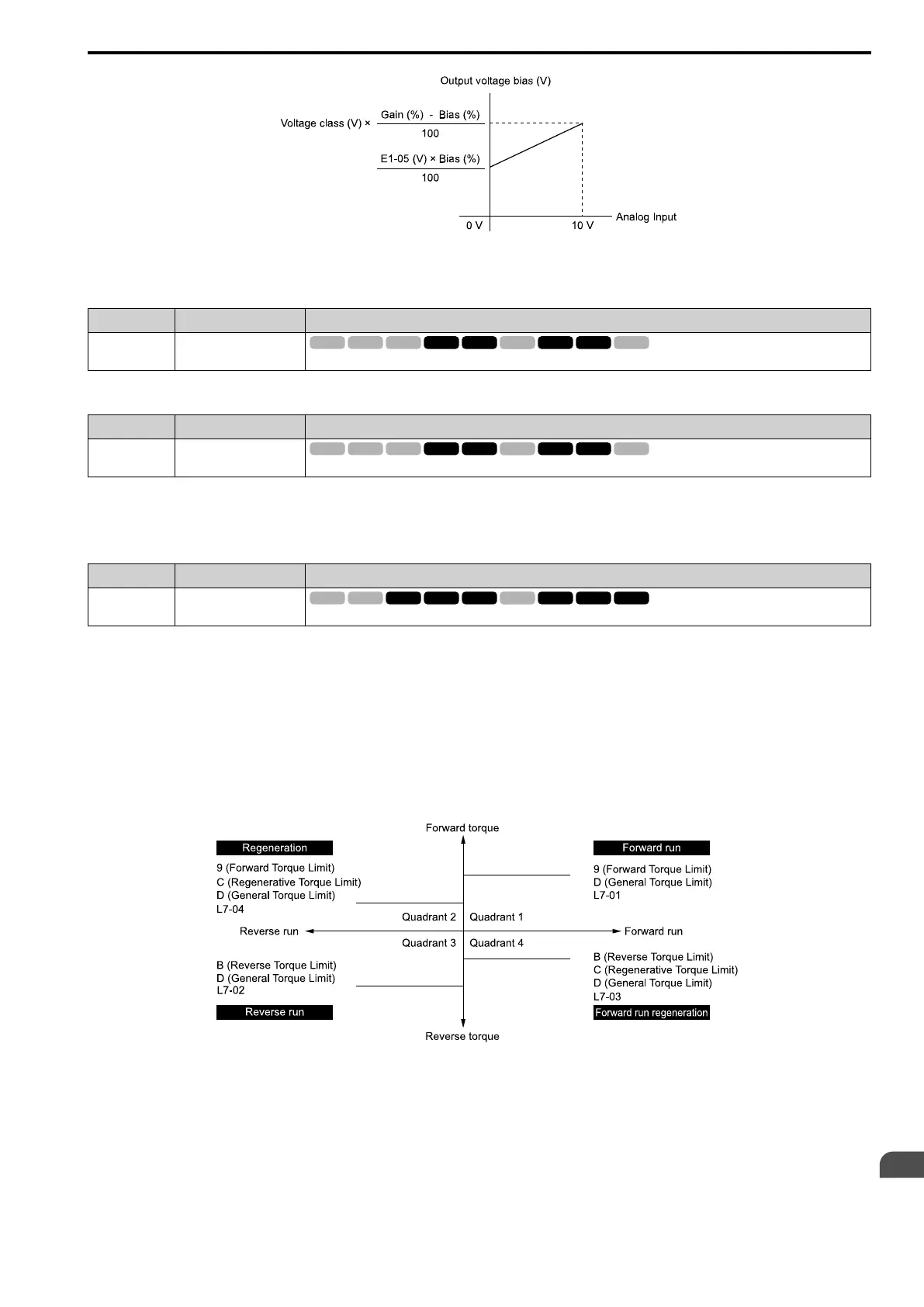
Figure 12.102 shows the configuration method for each quadrant.
Figure 12.102 Torque Limits and Analog Input Settings Parameters
Note:
• When you use L7-01 to L7-04 and analog inputs to set torque limits for the same quadrant, it will enable the lower torque limit.
In this example of parameter settings, the torque limit for quadrant 1 is 130% and the torque limit for quadrants 2, 3, and 4 is 150%:
Settings: L7-01 = 130%; L7-02 to L7-04 = 200%; and MFAI torque limit = 150%
• The output current of the drive limits the maximum output torque. The torque limit is 150% of the rated output current for HD and to
120% of the rated output current for ND. The actual output torque cannot be more than the limit of the drive rated output current,
although the torque limit is high.

 Loading...
Loading...




