Note: You can configure the device to output this register at a fixed rate
using the Async Data Output Type Register in the System subsystem.
Once configured the data in this register will be sent out with the $VNYMR
header.
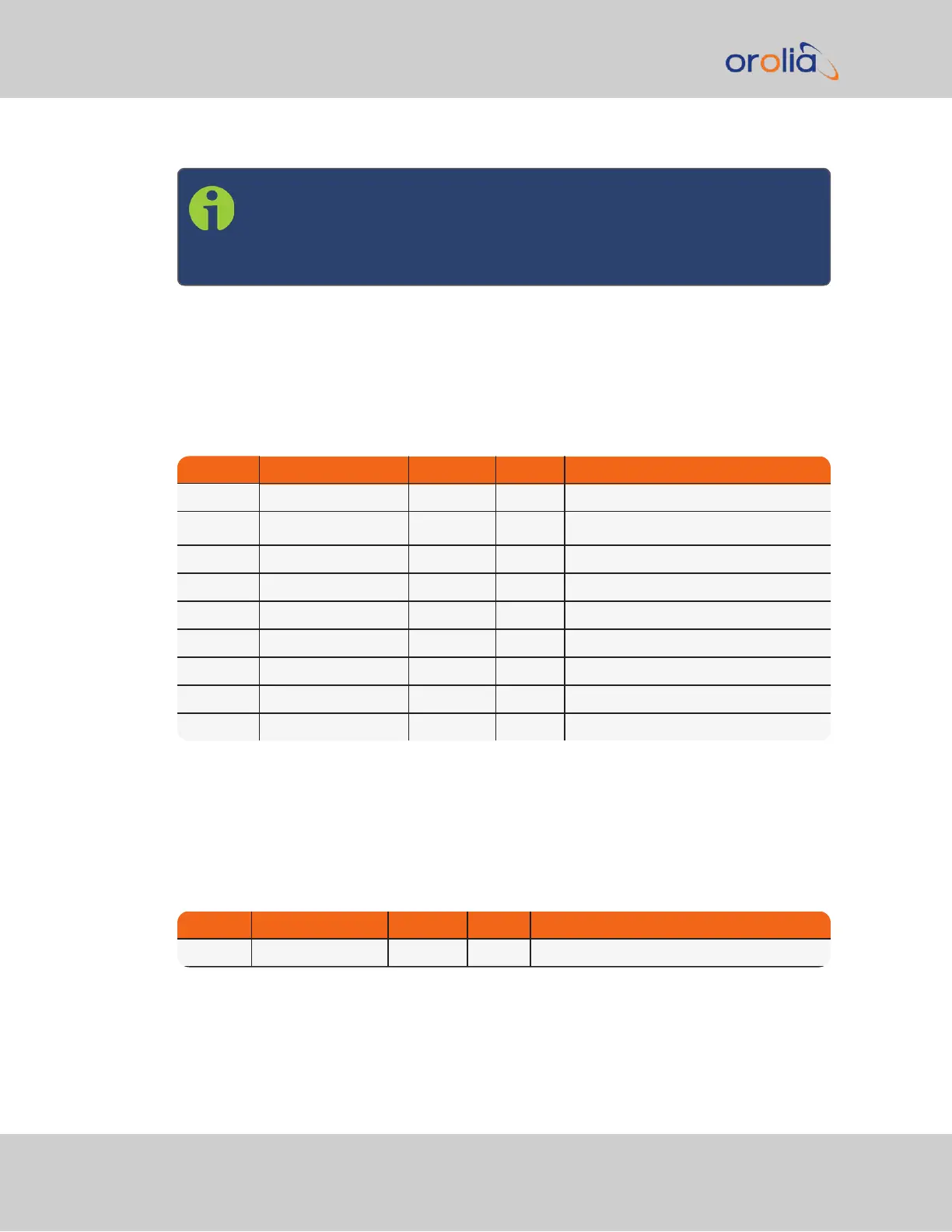
5.3.4.9 VNYBA
Output Type: Yaw, Pitch, Roll, Body True Acceleration, and Angular Rates
Async Header: YBA
Table 5-11:
VNYBA Settings
Offset Name Format Unit Description
0 Yaw float deg Yaw angle.
4 Pitch float deg Pitch angle.
8 Roll float deg Roll angle.
12 AccelX float m/s
2
True acceleration. (X-axis)
16 AccelY float m/s
2
True acceleration. (Y-axis)
20 AccelZ float m/s
2
True acceleration. (Z-axis)
24 AngularRateX float rad/s Angular rate. (X-axis)
28 AngularRateY float rad/s Angular rate. (Y-axis)
32 AngularRateZ float rad/s Angular rate. (Z-axis)
5.3.4.10 VNYIA
Output Type: Yaw, Pitch, Roll, Inertial True Acceleration, and Angular Rates
Async Header: YIA
Table 5-12:
VNYIA Settings
Offset Name Format Unit Description
0 Yaw float deg Yaw angle.
286 VersaSync User Manual
APPENDIX