294
Communication
command
2
mode
4
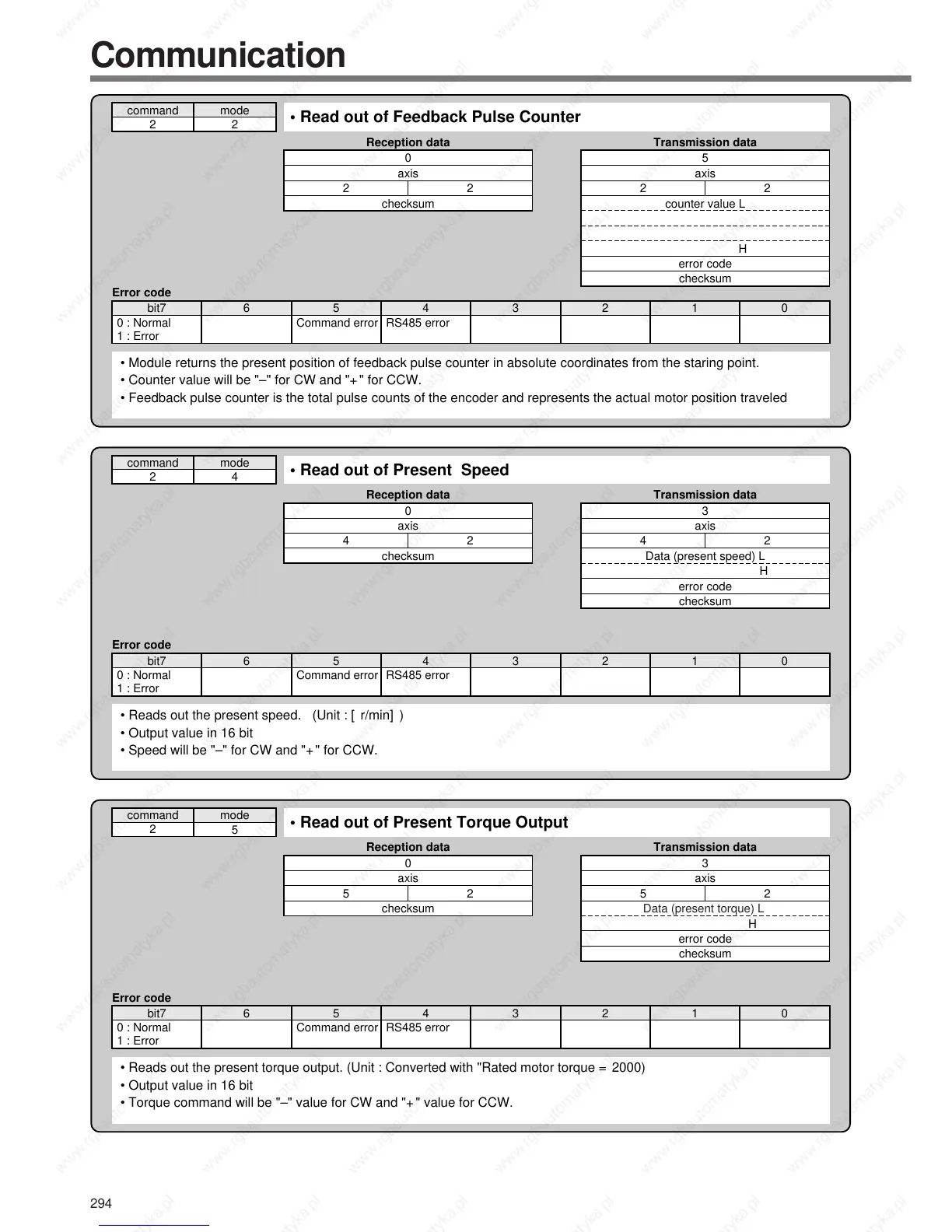
• Read out of Present Speed
Reception data
0
axis
checksum
24
Error code
Transmission data
• Reads out the present speed. (Unit : [r/min])
• Output value in 16 bit
• Speed will be "–" for CW and "+" for CCW.
bit7
0 : Normal
1 : Error
6543210
3
axis
Data (present speed) L
H
error code
checksum
24
command
2
mode
5
• Read out of Present Torque Output
Reception data
0
axis
checksum
25
Error code
Transmission data
• Reads out the present torque output. (Unit : Converted with "Rated motor torque = 2000)
• Output value in 16 bit
• Torque command will be "–" value for CW and "+" value for CCW.
bit7
0 : Normal
1 : Error
6543210
3
axis
Data (present torque) L
H
error code
checksum
25
command
2
mode
2
• Read out of Feedback Pulse Counter
Reception data
0
axis
checksum
22
Error code
Transmission data
• Module returns the present position of feedback pulse counter in absolute coordinates from the staring point.
• Counter value will be "–" for CW and "+" for CCW.
• Feedback pulse counter is the total pulse counts of the encoder and represents the actual motor position traveled
bit7
0 : Normal
1 : Error
65
Command error
4
RS485 error
Command error RS485 error
Command error RS485 error
3210
5
axis
counter value L
H
error code
checksum
22

 Loading...
Loading...