PreciseFlex_Robot
146
robots older than Revision C (2016) . You will need to obtain different PAC files from Precise
as one servo axis is deleted.
This modification should only be performed by a trained service technician. It requires a robot that has an
air line pre-installed at the factory. Some robots with servo grippers built after April 2014 have this
feature. If the air line is installed, a pneumatic fitting will be installed on the robot connector panel.
The user must:
1. Move the robot arm to a convenient height on the Z column for removing the servo gripper.
2. Turn off the robot power and remove the AC power cord.
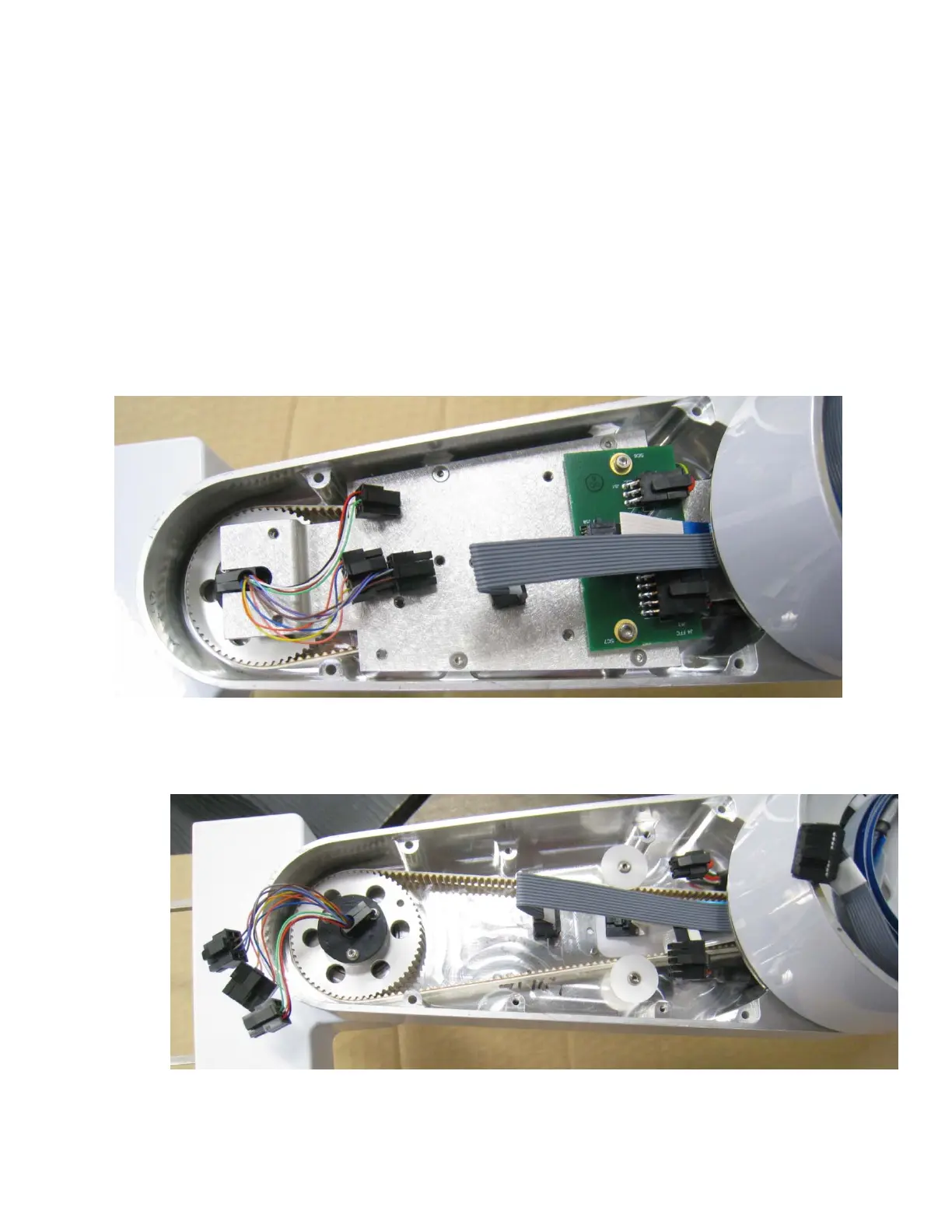
3. Remove the inner link cover by removing 4 M3 X 20 SHCS and lock washers.
4. Remove the outer link cover by removing 4 M3 X 20 SHCS and lock washers.
5. Remove the gripper controller (GSB) by removing 4 M3 X 8 SHCS.
6. Remove the FFC to motor cable interface board and sheet metal belt cover in the outer link.
7. Remove the bottom cover from the gripper.