PreciseFlex_Robot
148
11. Remove the slip ring.
12. Loosen the M3 screw that attaches the harness cable clamp to the J3 output pulley until the
clamp can be pulled all the way up to provide access to the M3 X 8 BHCS that closes the clamp.
Remove this screw and the rubber pad on the harness.
13. Remove the RS485 10 conductor ribbon cable from the robot by feeding the connector up past
the J4 motor in the outer link, removing this cable from the retaining clamps, and unplugging it
from the RS485 connector in the controller.
14. Plug IO cable for pneumatic gripper option into IO connector on side of inner link.
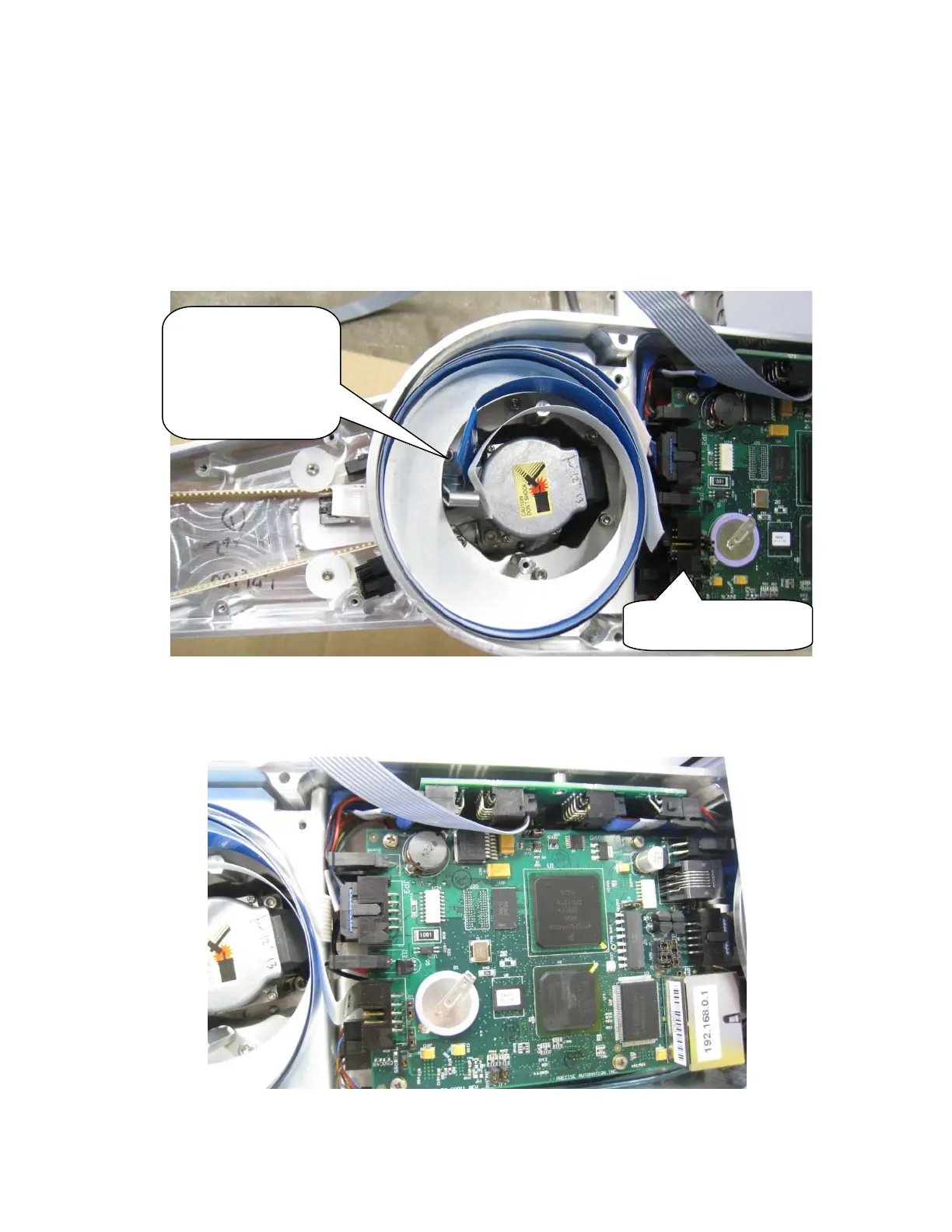
Loosen screw to
release clamp, then
pull up clamp and
remove screw that
closes clamp to
release cables.
Remove RS485 cable
from this
lu