2–20
Principles of Operation
are all considered by the RTPU processor as it programs the dot plucker and
the FTIC for each dot row.
Synchronizing Dot Plucking and Hammer Firing Transfer of dots to the
hammer driver must be synchronized with hammer firing. Dots are
transferred to the hammer driver in bursts, serial streams of dots that tell
which hammers will print when their phase is next fired. The bursts are timed
precisely; they must occur neither too early nor too late. Synchronization is
performed by having the FTIC request bursts from the dot plucker. The FTIC
reads the magnetic pick–up unit (MPU) to determine when to request a burst.
The time at which the burst request is made is contained in the fire timing
tables.
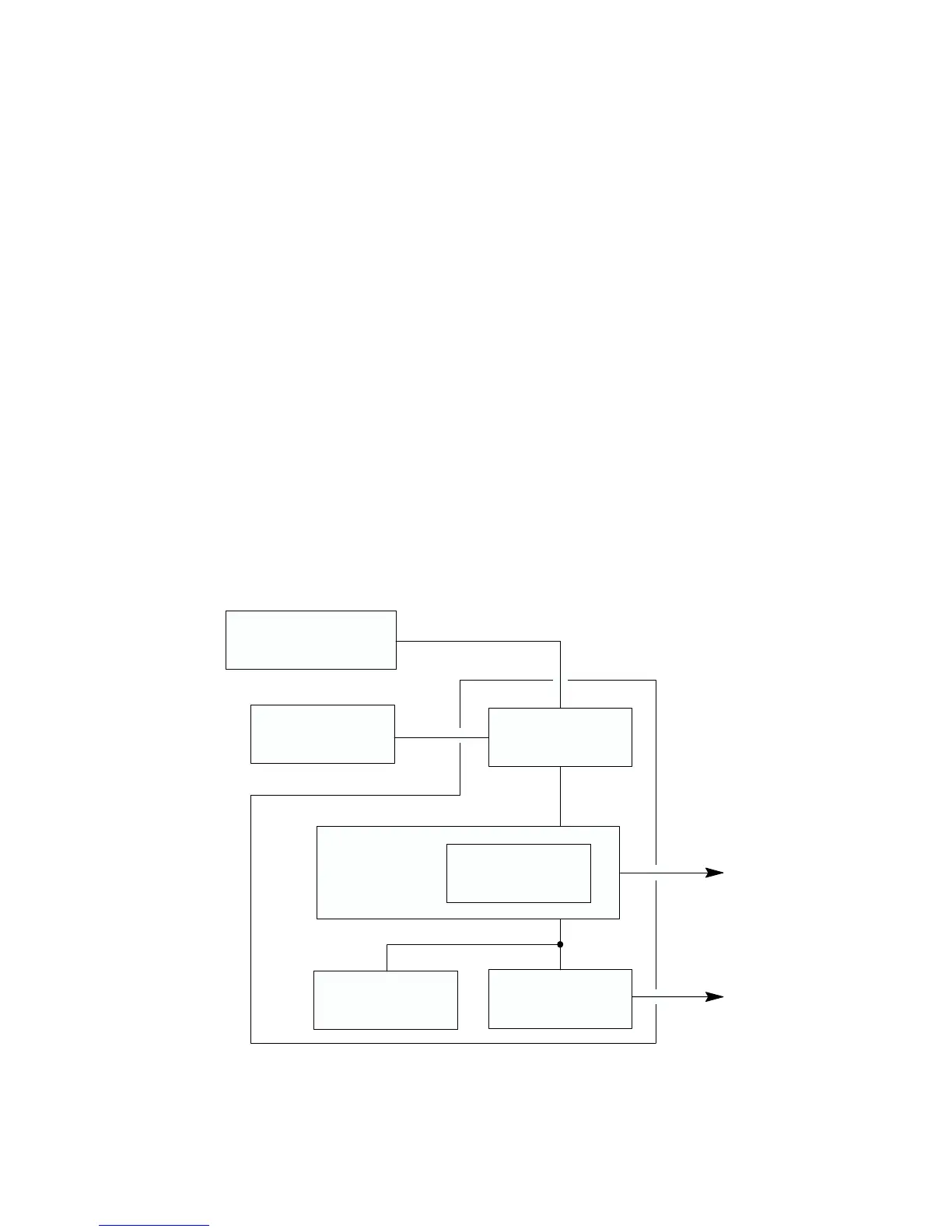
Mechanical Interface Functions
Three mechanical operations are coordinated in printing: paper motion,
ribbon motion, and shuttle motion. Virtually all digital handling of paper
motion is contained in the RTPU. The ribbon and shuttle are controlled by
logic on the mechanism driver board, under the direction of the RTPU.
Figure 2–14 shows the mechanical interface section of the RTPU.
DATA PROCESSING
RTPU
REAL–TIME PROCESSING UNIT
UNIT
PROCESSOR
UART
Dot Plucker
Paper Feed
EPROM
SHARED MEMORY
Shuttle
and
Ribbon
Paper
Control
Controller
Control
Figure 2–14. Mechanism Driver Interface Functions of the RTPU