PY Manual Copyright © 2006 SANYO DENKI AMERICA, Inc.
43
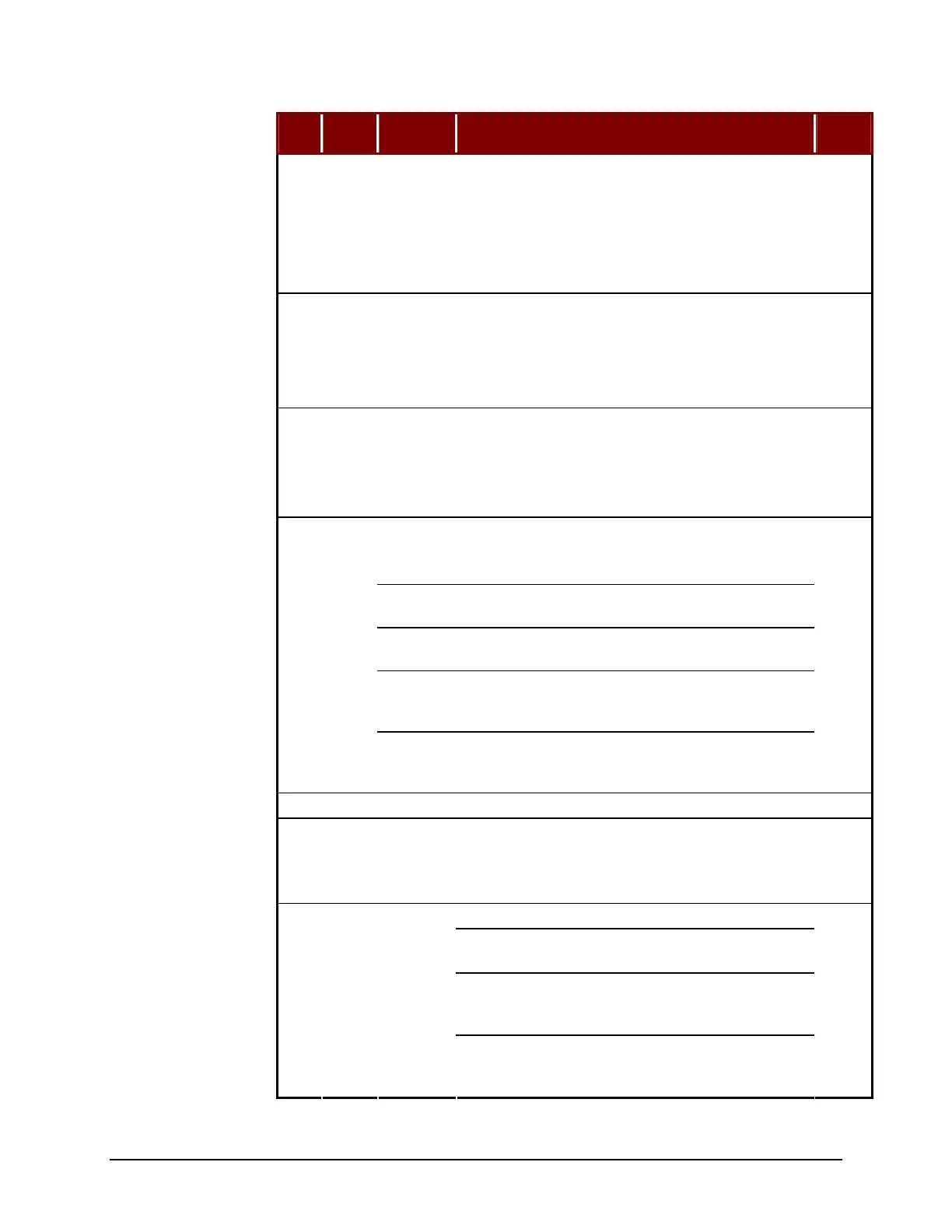
Pin TB Pos Abbrev. Description
Circuit
Type
32 22 PROT
Positive Rotation Over-travel. Counter clockwise
(CCW) over-travel limit. This input is used to indicate
that a travel limit has been reached in the CCW
direction of travel. When the input turns “ON”, a 120%
current limit is automatically applied, inhibiting
commands in the CCW direction.
1
33 23 NROT
Negative Rotation Over-travel. Clockwise (CW) over-
travel limit. This input is used to indicate that a travel
limit has been reached in the CW direction of travel.
When the input turns “ON”, a 120% current limit is
automatically applied, inhibiting commands in the CW
direction.
1
34 21
GEN.
PUR.
Several outputs can be selected:
Clear Deviation Error—(Position Mode). Turning
“ON” this input for 10mS or more will clear the
contents of the position deviation counter.
Internal Velocity Command—(Velocity Mode).
1
GEN.
PUR.
Several outputs can be selected:
This selection is set with Func3 parameter (Mode 2,
Page 4, Bits 0 and 1).
PCON
Proportional Control On. With this input “ON”, the
velocity loop becomes proportional control.
ECLR
This switch is turned “ON” to clear the position
deviation.
PMUL/VC
S1
Pulse Multiplier. With this input “ON”, command
pulses are multiplied by the gear ratio set by the PMUL
parameter (Mode 1, Page 3).
35/36 49/20
INH/ZCM
D
Inhibit. With this input “ON”, incoming pulses are
inhibited (position mode) or velocity is clamped
(velocity mode).
1
37 1 SON Servo ON. Enables the amplifier, if there are no alarms. N/A
38 39 5V
Output Sequence Power Supply. External power supply
for CN1-39, 40, 41, 42, 43, 44, 45, and 46. Use only Pin
38 or 49, NOT both.
N/A
Several outputs can be selected:
ILIM—Current Limit Status Output. This signal comes
“ON” to indicate the amplifier is in current limit.
LTG—Low Speed (Velocity Mode). When the motor
speed becomes ±50 RPM or less of the set value, this
signal goes to low impedance.
39/40 30/31 GEN. PUR
HTG—High Speed (Velocity Mode). When the motor
speed becomes ±1000 RPM or more of the set value,
this signal goes to low impedance.
6
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com