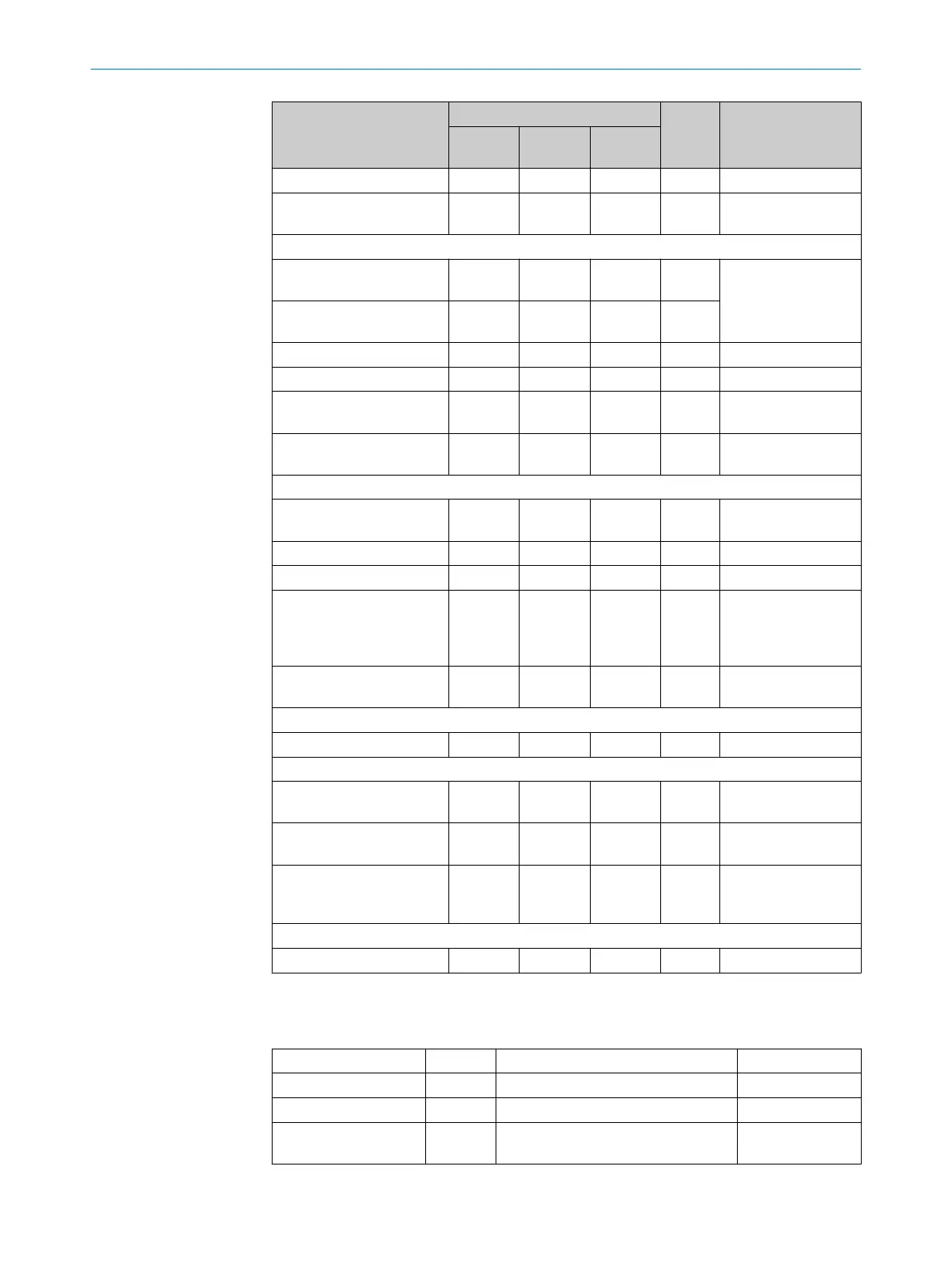
Parameter
Value
Units Remarks
Minimum Typical
Maxi‐
mum
Reset duration 0.02 0.06 µs Reset is High active
Recovery time following
communications failure
727 µs
Characteristics of the motor feedback system
Position resolution per rev‐
olution
23 40 Bit
The total can be a
maximum of 40 bit
Number of resolved revolu‐
tions
16 40 Bit
Rotation speed
262,000 rad/s 24 bit/rotation
Acceleration 670,000 rad/s² 24 bit/rotation
Dead time 10.5 µs
SYNC trigger to posi‐
tion register update
Sampling latency 1 µs
SYNC trigger to posi‐
tion sampling time
Characteristics of the host interface
Cycle time of the frequency
inverter
12.1 1,950 µs In SYNC mode
Packet cycle time 12.1 27 µs In SYNC mode
Packet cycle time 11.52 µs
Infree-running mode
Duration of the SYNC signal 0.04 µs
The SYNC signal
must be inactive for
at least 0.04 µs per
cycle.
SYNC signal jitter 26 ns
±2 System clock
cycles
Characteristics of the SPI PIPE interface
Clock of SPI PIPE 10 MHz
Characteristics of the parameter channel
Theoretical transmission
rate
166 334 kBd
Duration of access to the
communications resource
167 1,100 µs
“short message”
Duration of access to the
encoder resource
75 ms
“long message”,
including encoder
processing time
Characteristics of the SensorHub channel
Transmission rate 334 669 kBd
The following table contains a description of the pin functions of the DSL Master IP
Core. Pin functions
Table 186: Pin functions of the IP Core
Pin description
Type Function Note
rst Input Master reset (High active)
clk Input Clock input
sync Input Drive cycle for position sampling trig‐
ger
9 FPGA IP-CORE
138
T E C H N I C A L I N F O R M A T I O N | HIPERFACE DSL
®
8017595/ZTW6/2018-01-15 | SICK
Subject to change without notice
 Loading...
Loading...




