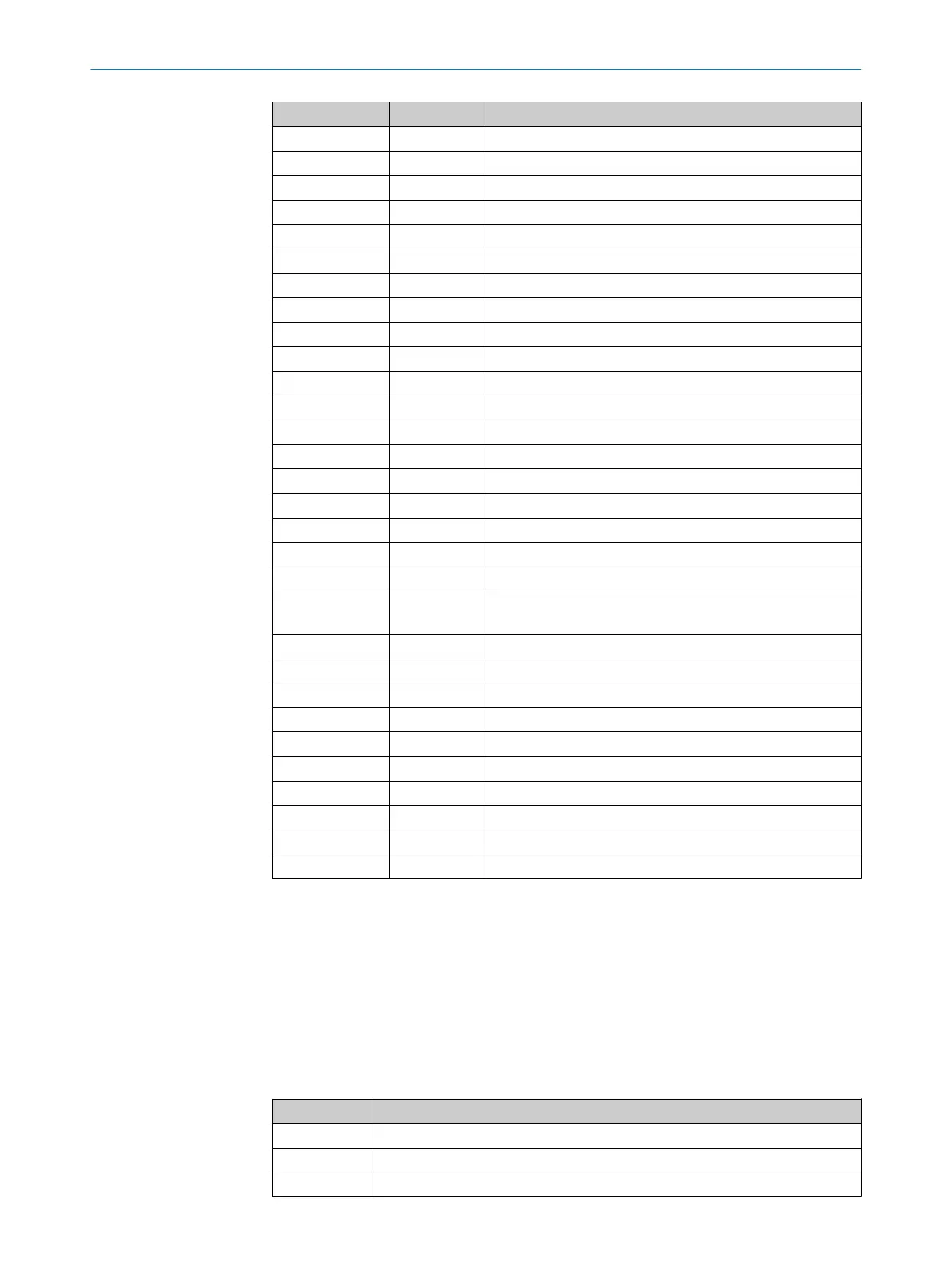
RDB definition Data area Description
0 Read possible for all.
1 For read, the "operator" access level is required.
2 For read, the "maintenance" access level is required.
3 For read, the "authorized client" access level is required.
4 For read, the "service" access level is required.
15 No read access possible.
W Write access:
0 Write possible for all.
1 For write, the "operator" access level is required.
2 For write, the "maintenance" access level is required.
3 For write, the "authorized client" access level is required.
4 For write, the "service" access level is required.
15 No write access possible.
Time overrun 0 – 254 Resources access time overrun in milliseconds. If the DSL
system does not react to a "long message" within this period,
then there is probably a processing error.
255 The resource needs more than 254 ms for processing or the
time overrun is not deterministic.
Resource 00h Node indicator (index, 16 bit)
data type 01h 02h Void (no data)
Bit (1 = true/0 = false)
03h 8 bit, unsigned
04h 16 bit, unsigned
05h 32 bit, unsigned
06h 64 bit, unsigned
07h 8 bit, with sign
08h 16 bit, with sign
09h 32 bit, with sign
0Ah 64 bit, with sign
0Bh String (character chain)
10h to 4Fh Data structure with data length 0 to 63 bytes
If the size of a resource gives a higher byte total than the data type needs, then it is an
array of the data type given.
8.3
Node
All resources of a DSL motor feedback system have a logical tree structure (see
chapter 8.1.2). This arrangement is structured with node resources.
An indirect read access to a node returns the address of a linked node or a linked
resource. For this, an offset must be given to determine the type of information:
Table 47: Indirect read access to nodes.
Offset Value
0 Number of linked nodes n
1 RID of the first linked node
…
8 MOTOR FEEDBACK SYSTEM RESOURCES
90
T E C H N I C A L I N F O R M A T I O N | HIPERFACE DSL
®
8017595/ZTW6/2018-01-15 | SICK
Subject to change without notice