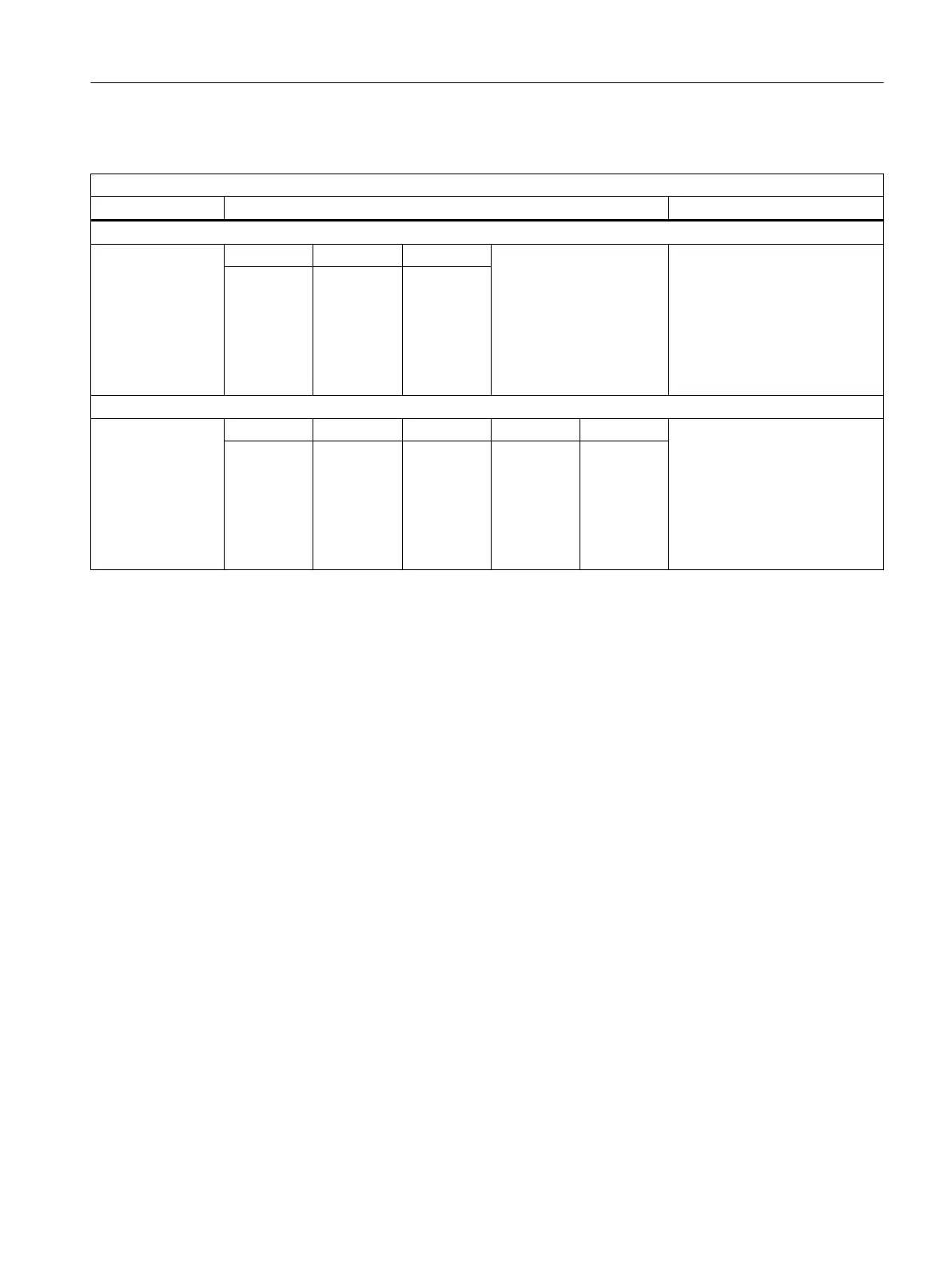
Polynomial functions
Identifier Parameter Explanation
SYNFCT 1. 2. 3. If the condition in the motion-
synchronous action is fulfilled,
the polynomial determined by
the first expression is evaluated
at the input variable. The upper
and lower range of the value is
limited and the result variable is
assigned.
INT:
Number of
the polyno‐
mial func‐
tion defined
with
FCTDEF
VAR REAL:
Result vari‐
able *
)
VAR REAL:
Input varia‐
ble **
)
FTOC 1. 2. 3. 4. 5. Change of fine tool compensa‐
tion depending on a function de‐
fined with FCTDEF (max. 3rd
degree polynomial).
The number used here must be
specified in FCTDEF.
INT:
Number of
the polyno‐
mial func‐
tion defined
with
FCTDEF
VAR REAL:
Input varia‐
ble **
)
INT:
Length
1, 2, 3
INT:
Channel
number
INT:
Spindle
number
*
)
Only special system variables are permissible as a result variable (see Function Manual Synchronized Actions).
**
)
Only special system variables are permissible as input variable (see Function Manual Synchronized Actions).
Tables
4.5 Predefined procedures in synchronized actions
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 1289
 Loading...
Loading...

















