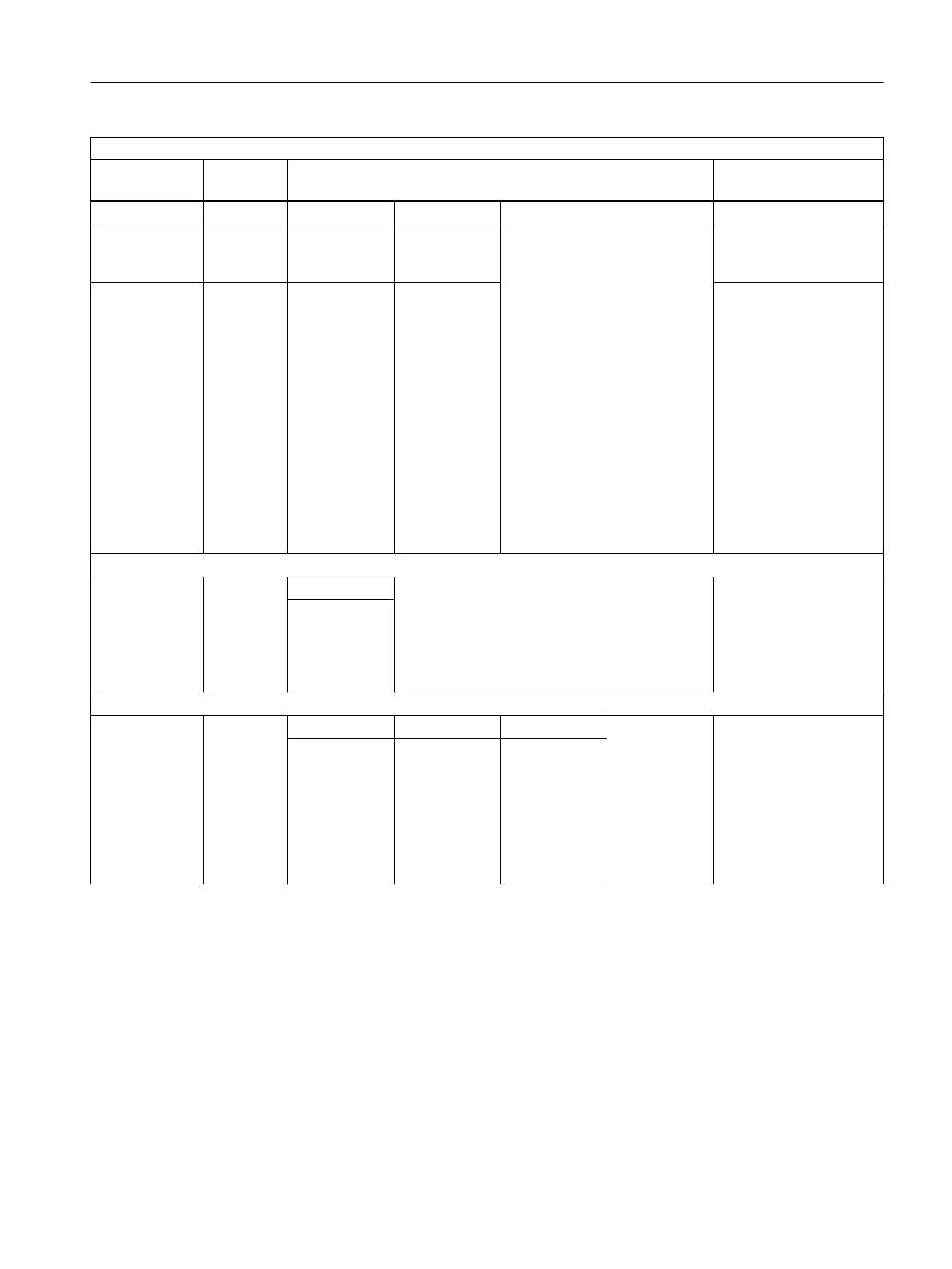
Coordinate system
Identifier Return val‐
ue
Parameter Explanation
1. 2.
CRPL FRAME INT:
Rotary axis
REAL:
Angle of rota‐
tion
Frame rotation in any
plane
ADDFRAME INT:
0: OK
1: Speci‐
fied target
(string) is
wrong
2: Target
frame is
not config‐
ured
3: Rotation
in frame is
not permit‐
ted
FRAME:
Additively
measured or
calculated
frame
STRING:
Specified tar‐
get frame
Calculates the target
frame specified by the
string
The target frame is cal‐
culated in such a way
that the new complete
frame appears as a
chain of the old complete
frame and the transfer‐
red frame.
INVFRAME FRAME 1. Calculates the inverse
frame from a frame
The frame chaining of a
frame with its inverse
frame always results in a
zero frame
FRAME
MEAFRAME FRAME 1. 2. 3. Frame calculation from 3
measuring points in
space
REAL[3,3]:
Coordinates of
the measured
spatial points
REAL[3,3]:
Coordinates of
the specified
points
VAR REAL:
Variable with
which the infor‐
mation on the
quality of
FRAME calcu‐
lation is re‐
turned
Tables
4.6 Predefined functions
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 1291
 Loading...
Loading...

















