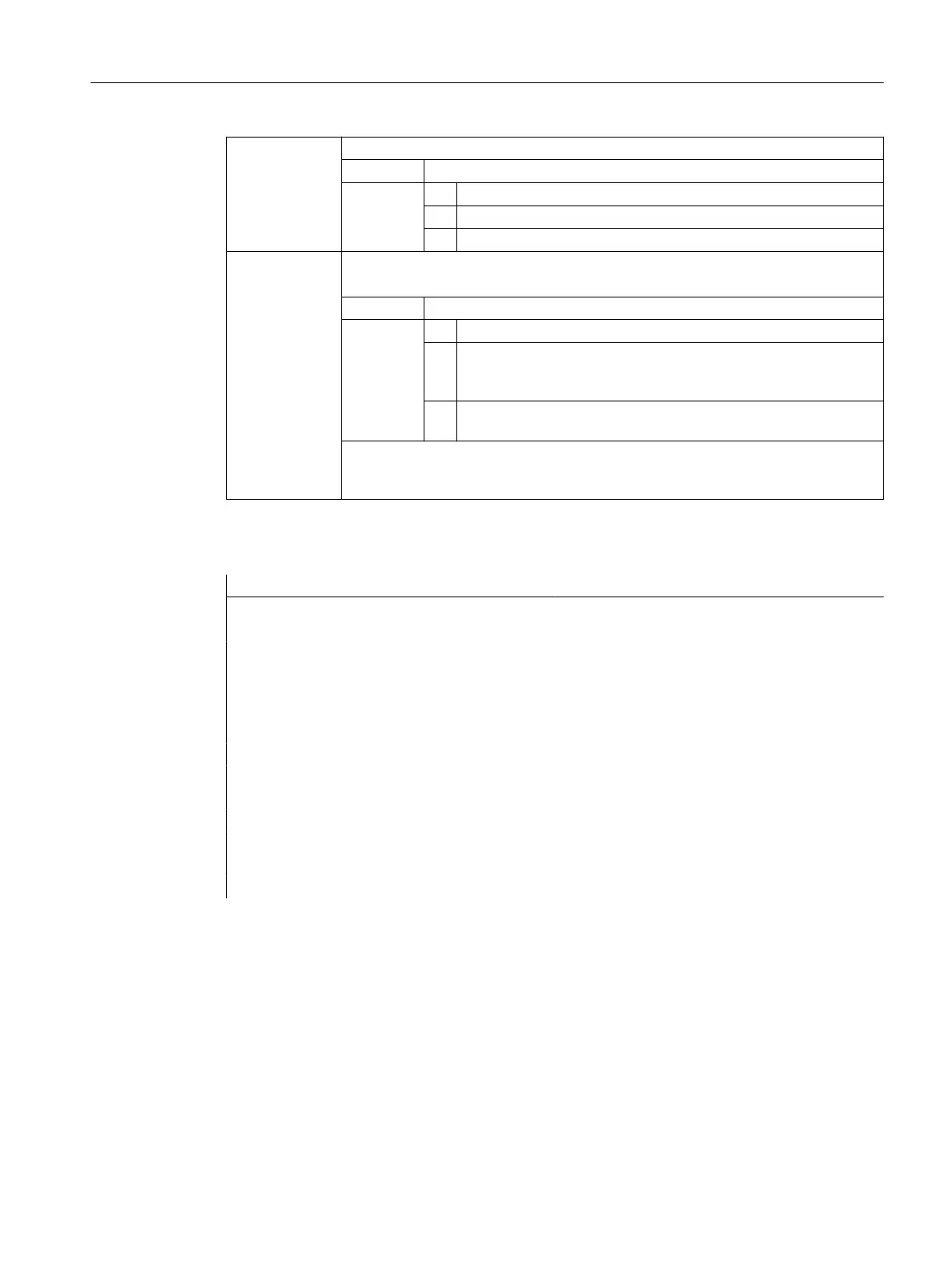
<InVar>: Input variable of the adaptation relationship
Data type: INT
Value: 1 Inertia of the axis
2 Axis position:
3 Axis speed
<InVal>: Input value of the adaptation relationship
Optional parameter for intelligent load adjustment (<InVar>=1).
Data type: REAL
Value: > 0 Actual moment of inertia
= 0 Load/loading is not defined or is not known. In this particular case,
the assigned adaptations supply substitute value 1.0 as output
variable.
< 0 The call is exited with <Status> = 5 (parameter <InVal> invalid).
The last input value activated remains active.
Note:
If an input value is not programmed, the last programmed value or the default value
(= 0) after the control system has run up is active.
Example
Program code Comment
DEF INT RESULT ; Definition of result variables
...
CADAPTON(RESULT,MX1,2) ; Activate adaptation
IF RESULT <> 0 ; Evaluate the result variables (this is
required after each CADAPTON/CADAPTOF in-
struction)
MSG("CADAPT-RESULT=" << RESULT)
STOPRE
SETAL(61000)
ENDIF
...
CADAPTOF(RESULT,MX1,2) ; Deactivate adaptation
... ; Evaluate result variables
...
Further information
Link axes
The function cannot be applied to link axes (NCU-Link function). In this case, the result variable
would supply return value 2 ("Parameter <Axis> invalid").
Work preparation
3.15 Axis functions
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 887
 Loading...
Loading...

















