Issue 01/05 Information for the CANopen master
CANopen Option Module Operating Instructions
6SE6400-5BC00-0BP0
77
In order to set the mapping for PDO 5 or PDO 6 via the CANopen master, the
usual sequence must be maintained (also refer to DS 301):
1/ Set the number of mapping entries in the subindex 0 to 0
2/ Write new mapping entries - one after the other - into sub-indices 1 to 4
3/ Set the number of mapping entries in subindex 0 to the number of the now newly
mapped objects (2 for 2 mapping entries, 4 for 4 mapping entries...)
NOTE
The internal MICROMASTER parameters only use a single bit in order to specify a
mapping parameter. This is the reason that in CANopen, a specific sequence must
be maintained when writing the mapping values. The connection between drive
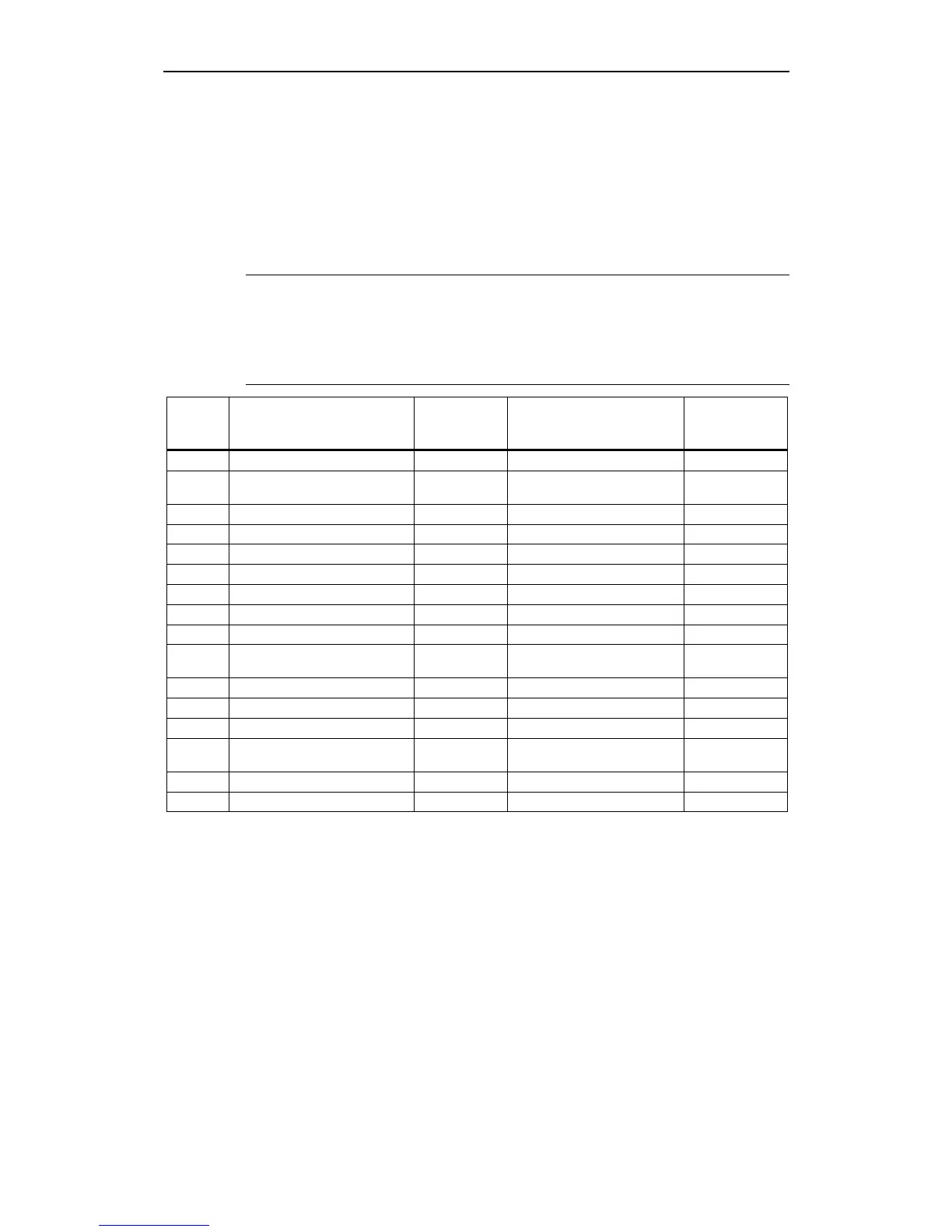
parameters and mapping entry is specified in the following table:
Direction Mapping Saved
mapping value
Mapping sequence Bit number in
P2041.02 or
P2041.03
R_PDO Control word 60400010 1 (lowest mapping index) Bit 0
R_PDO Setpoint (reference) speed 60420010H or
60520010H
2 Bit 1
R_PDO Free object 2802 subindex 3 28020310H 3 Bit 2
R_PDO Free object 2802 subindex 3 28020410H 4 Bit 3
R_PDO Setpoint (reference) torque 60710010H 5 Bit 4
R_PDO Free object 2802 subindex 3 28020610H 6 Bit 5
R_PDO Modes of operation 60600008H 7 (highest mapping index) Bit 6
R_PDO Select RPM or per unit - - Bit 7
T_PDO Status word 60410010H 1 (lowest mapping index) Bit 8
T_PDO Speed control quantity 60430010H or
60530010H
2 Bit 9
T_PDO Free object 2803 index 3 28030310H 3 Bit 10
T_PDO Free object 2803 index 4 28030410H 4 Bit 11
T_PDO Actual torque 60770010H 5 Bit 12
T_PDO Actual speed 60440010H or
60540010H
6 Bit 13
T_PDO Displays the operating mode 60610008H 7 (highest mapping index) Bit 14
T_PDO Select RPM or per unit - - Bit 15
Objects can only be mapped in MICROMASTER 440