Control functions
7.8 Communicating with the PLC
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
265
ity when BOP, V-ASSISTANT, and USS access the same parameter at the
same time, the value of the parameter depends on the last access operation.
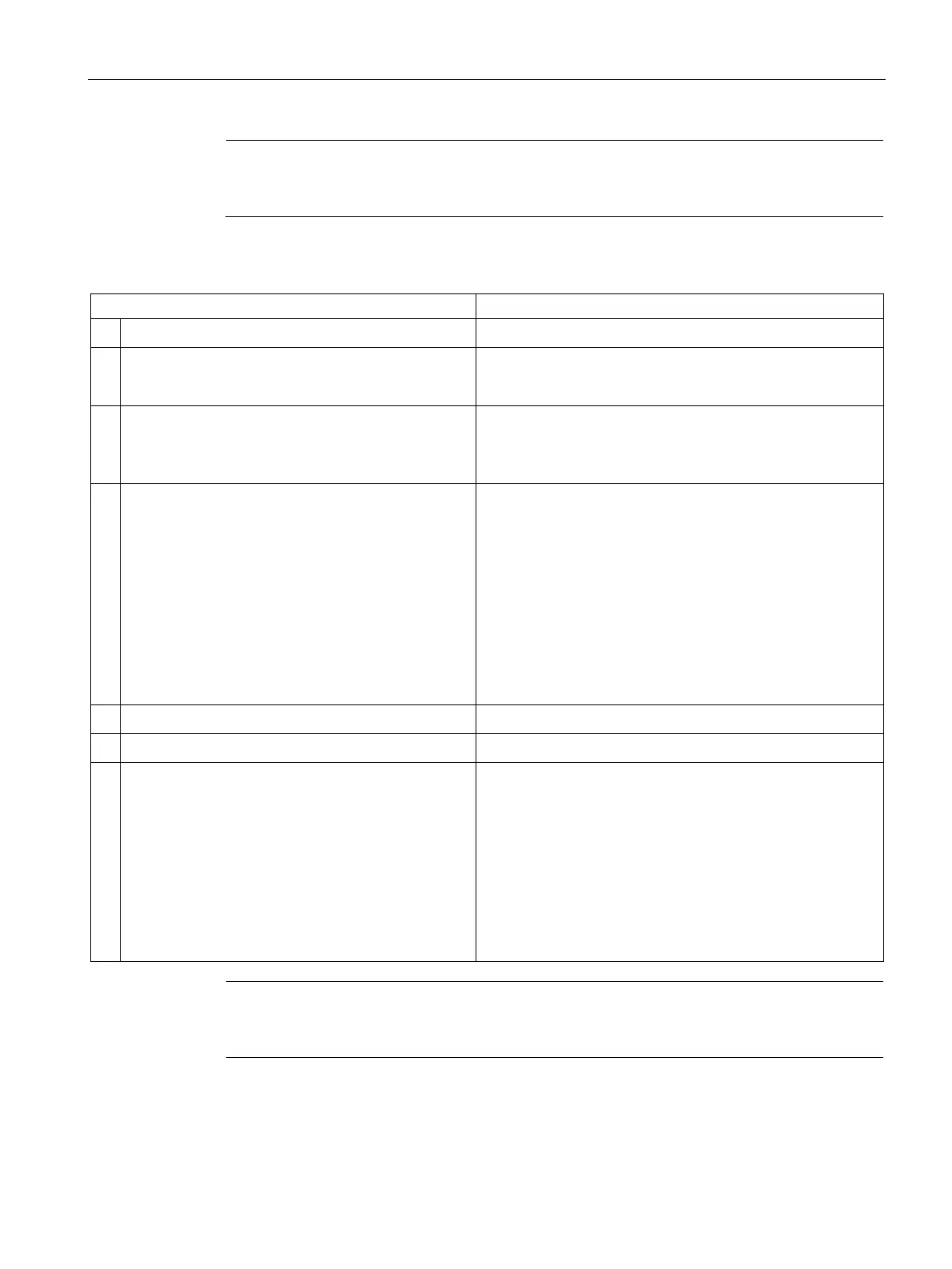
Configure the setup and program the PLC.
②
Configure the RS485 bus address by parameter
p29004.
The RS485 bus is used to transfer current absolute position of
the servo drive to the upper controller/PLC. You can configure
the slaver address from 1 to 31.
Select the USS communication protocol by parameter
p29007.
• p29007 = 0: no protocol
• p29007 = 1: USS protocol
• p29007 = 2: Modbus protocol
④
Set the transmission baud rate by parameter p29009.
• 5: 4800 baud
• 6: 9600 baud
• 7: 19200 baud
• 8: 38400 baud
• 9: 57600 baud
• 10: 76800 baud
• 11: 93750 baud
• 12: 115200 baud
• 13: 187500 baud
Set control mode for the drive.
Save the parameters and restart the drive.
⑦
Access the parameters via USS. For IPos control mode, you can change the following parame-
ters via USS:
• p2617[0...7], p2618[0...7], p2572, p2573
For S control mode, you can change the following parameter
via USS:
• p1001 to p1007
Ten monitor parameters can be read by USS:
• r0020, r0021, r0026, r0027, r0031, r0032, r0034, r0807,
r2556, and r2521
Note
The USS protocol communication libraries of S7
-200, S7-200 SMART V1.0, and S7-
1200 do
not support the communication with the SINAMICS V90 servo drive.