Appendix
A.2 Motor selection
SINAMICS V90, SIMOTICS S-1FL6
Operating Instructions, 04/2019, A5E36037884-007
423
Parameter description
Torque
● Summit torque: It refers to the maximum torque required by a motor in operation, which is
generally less than 80% of the motor’s maximum torque. When the torque is a negative
value, regenerative resistors may be needed.
● Moving torque and hold torque in standstill: It refers to the torque required by a motor in
long-term operation, which is generally less than 80% of the motor’s rated torque. When
the torque is a negative value, regenerative resistors may be needed.
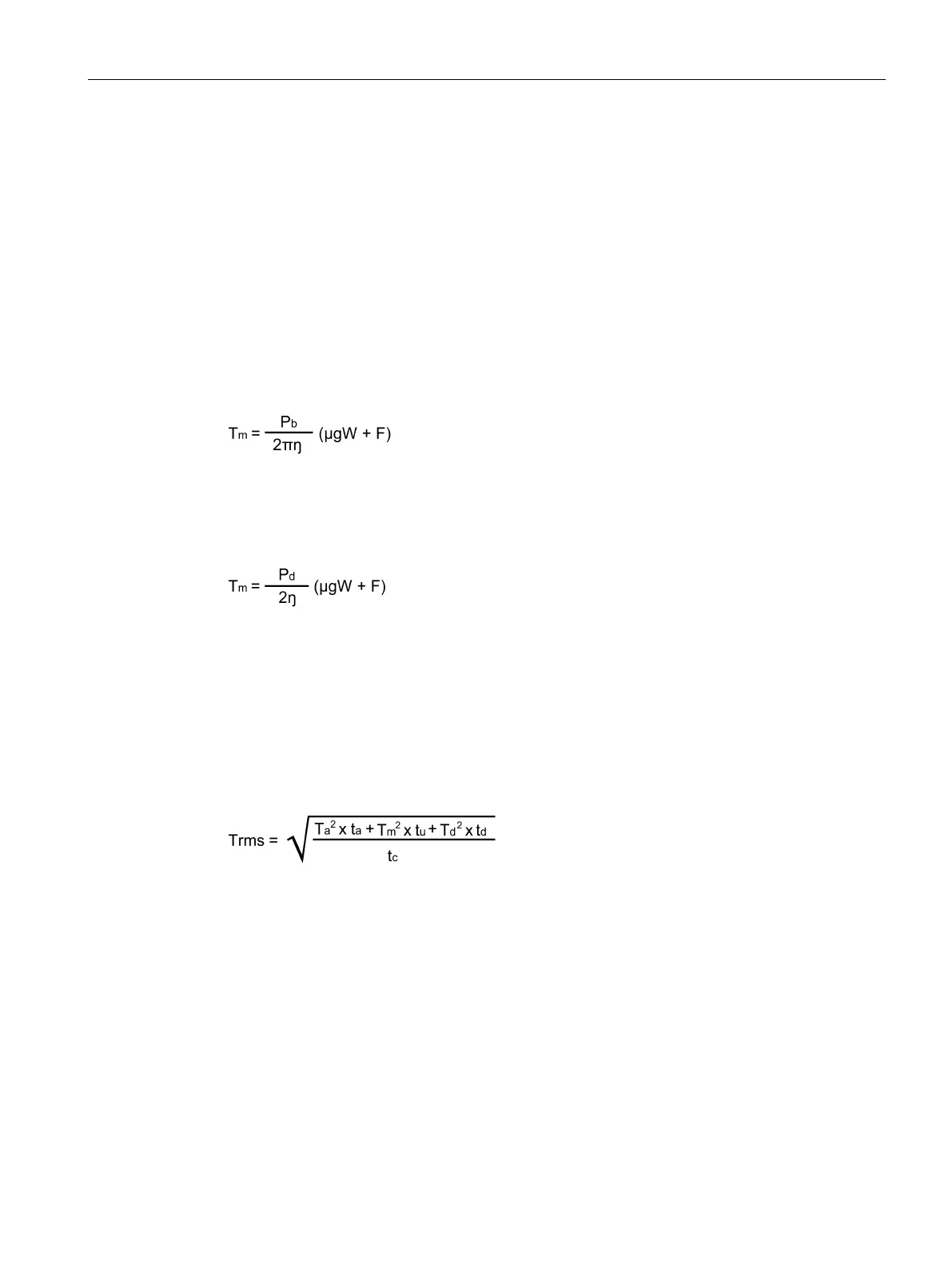
Torque calculation methods of two major mechanism types:
b
: Ball screw lead [m]
g: Gravitational acceleration 9.8 [m/s
2
d
: Belt transmission lead [m]
g: Gravitational acceleration 9.8 [m/s
2
● Effective torque: It refers to the continuous effective load torque converted into the
equivalent value on the servo motor shaft, which is generally less than 80% of the motor’s
rated torque.
a
: Acceleration torque [N·m]
m
: Moving torque [N·m]
d
: Deceleration torque [N·m]
a
: Acceleration time [s]
u
: Constant motion time [s]
d
c
: Cycle time [s]
Maximum speed: It refers to the motor's maximum speed in operation, which is generally
lower than the rated speed. When a motor operating at the maximum speed, pay attention to
its torque and temperature rise.