Tuning
9.1 Controller overview
SINAMICS V90, SIMOTICS S-1FL6
314 Operating Instructions, 04/2019, A5E36037884-007
● Speed loop gain
Speed loop gain directly influences the response level of the speed loop. If the
mechanical system does not vibrate or produce noises, you can increase the value of
speed loop gain so that the response level can be increased.
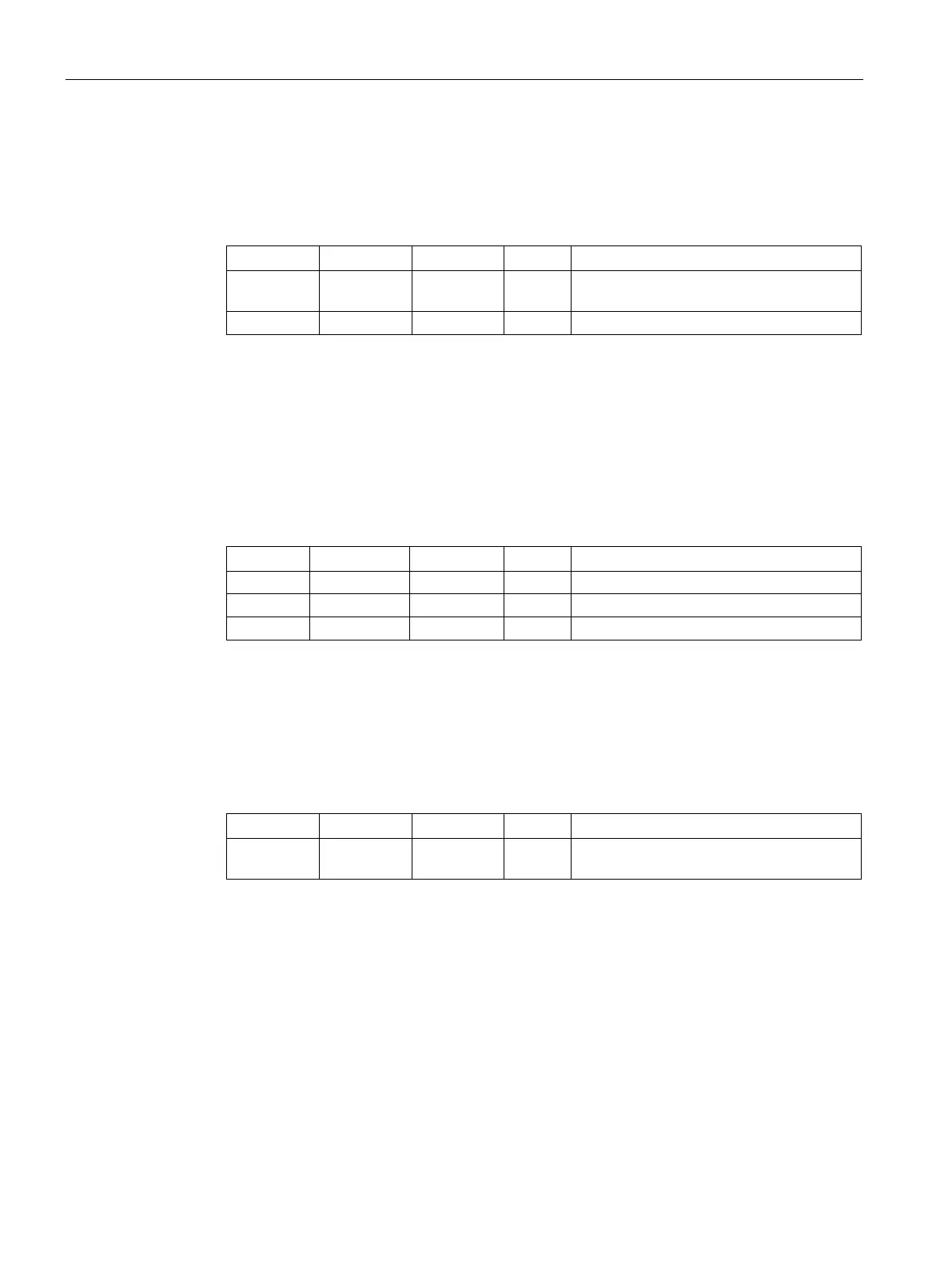
p29120[0] 0 to 999999 Motor de-
Nms/rad Speed loop gain 1
● Speed loop integral gain
With adding integral component into speed loop, the servo drive can efficiently eliminate
the steady-state error of speed and give response to a small change to speed.
Generally speaking, if the mechanical system does not vibrate or produce noises, you
can decrease speed loop integral gain so that the system rigidity can be increased.
If the load inertia ratio is very high or the mechanical system has a resonance factor, it
must be guaranteed that the speed loop integral time constant is big enough; otherwise,
the mechanical system may have a resonance.
Speed loop integral time 1
p29121[1] 0 to 100000 20 ms Speed loop integral time 2
Load moment of inertia ratio
● Position loop feed forward gain
With position loop feed forward gain, the responsiveness level can be increased. If the
position loop feed forward gain is too big, motor speed can have overshoots and the
digital output signal INP can have a repeated on/off. You, therefore, must monitor the
changes to speed waveform and the action of the digital output signal INP during
adjustment. You can slowly adjust the position loop feed forward gain. The effect of feed
forward function is not obvious if the position loop gain is too big.
p29111 0.00 to
0 % Position loop feed forward gain