Appendix 02.2001 SLE / SLE-DP – SIMOLINK Encoder
Siemens AG GWE-477 763 4070.76 J
SIMOVERT MASTERDRIVES Operating Instructions
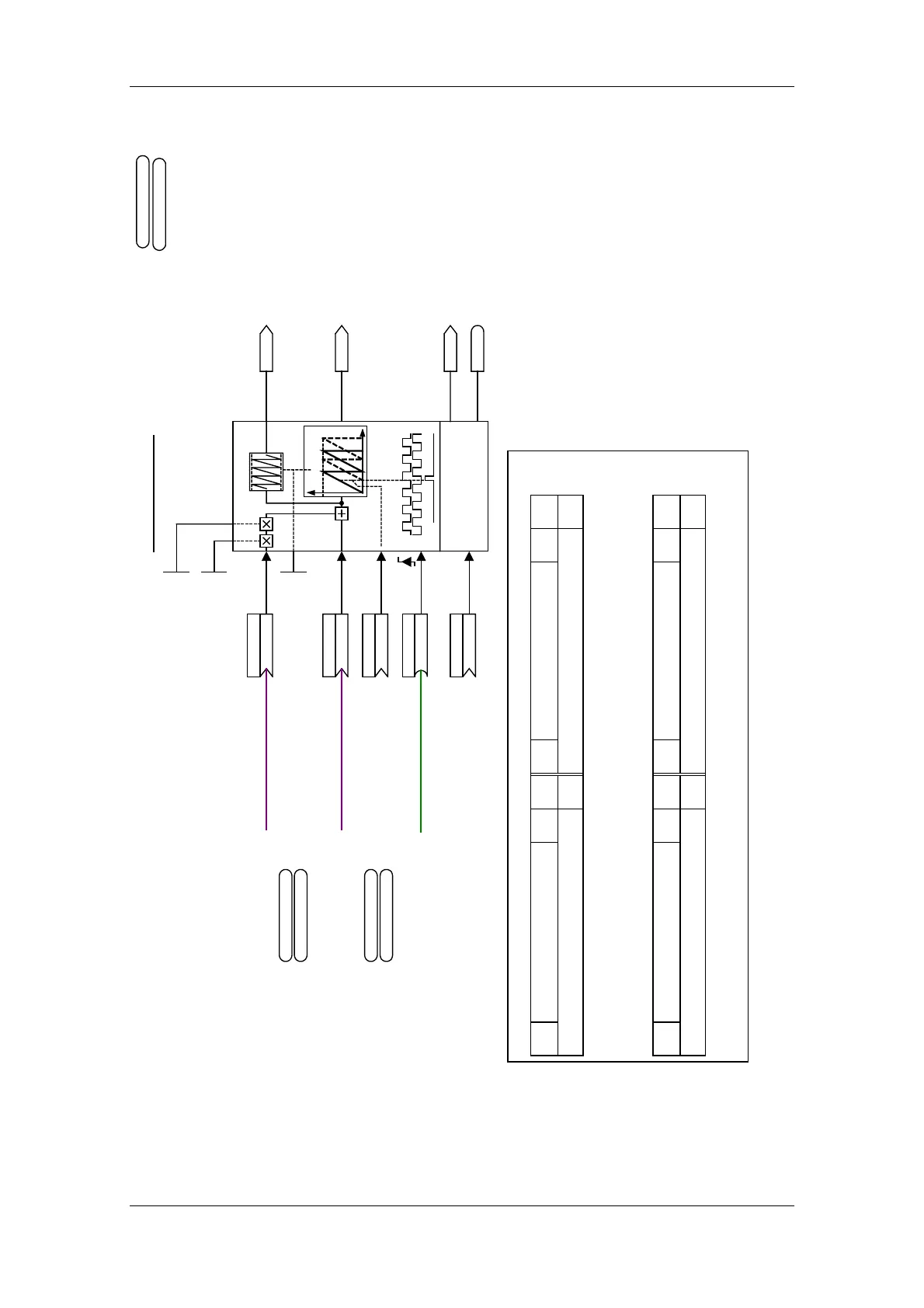
Bit: 0 = SLE deactivated; 0->1 Load settng value to SLE; 1 = SLE active
Actual value data format:
SLE setpoint
KK 848
SLE setpoint
to SIMOLINK transmit channel
from virt. master to SIMOLINK
U963.28 = 3360
U804 (0)
B XXXX
Activate SLE
U803.02 (0)
KK
Src. SLE offset
U803.03 (0)
KK
Src SLE acutal value
ACL
U803.01 (0)
KK 610
Src. setpoint
K 849
SLE actual value
B835
SLE active
31 17 16 15 1 0
BitSetting value (0...32767)xSetpoint (0...32767)
Setpoint data format:
Setpoint: Position setpoint of master axis
Setting value: Position of zero pulse in relastion to master axis
Actual value: SLE actual value
Bit: 0 = not initialized; 1 = SLE active
31 17 16 15 1 0
BitxxActual value (0...32767)
from SIMOLINK transmit channel
Axis cycle length
1048576 [LU]
U805 (32768)
Rated speed
1572864.00 [1000 LU/min]
U806 (0.00)
U803.04 (0)
KK 571
Q.SLE Istgeschw.
Deadtime adaptation
0.00 ms
U807 (0.00)
KK 850
Setpoint deadtime-compensated
from master
<1>
Offset specifies the zero pulse
position in relation to setpoint
(U803.01).
With rising edge at U804.
<1>
U953.28 = 04 (20)
from VM
KK 610 [791.6]
position setpoint
Set SLE
from ramp-function generator
KK 571 [790.8]
v setpoint
U951.51 = 4
U953.35 = 4
U963.35 = 3350
U961.51 = 3340
Free block, SLE SIMOLINK Encoder
Operation on firmware version >= 1.41