05.2006 Parameterizing Steps
Siemens AG 6SE7087-2JD60
SIMOVERT MASTERDRIVES Operating Instructions 9-33
87654321
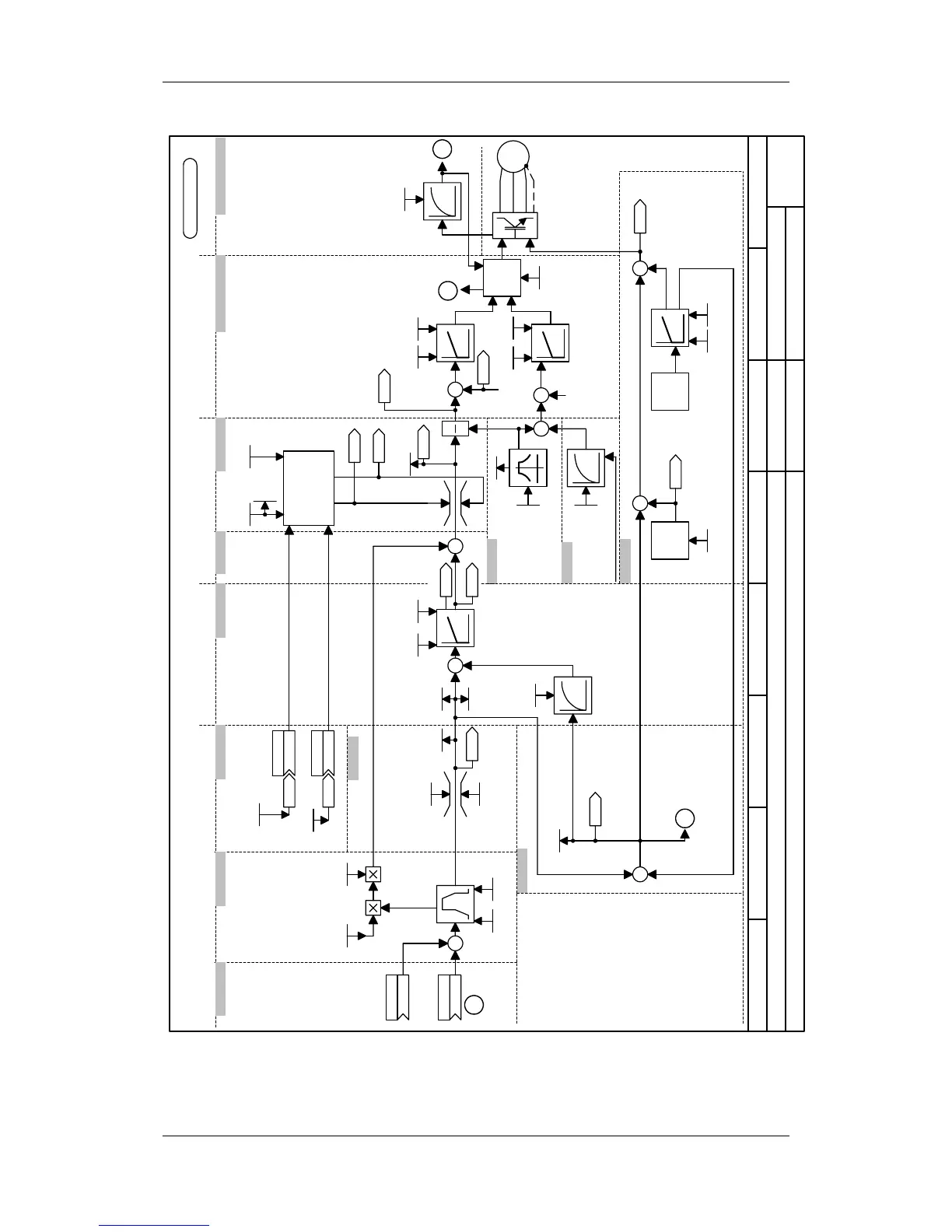
Closed-loop speed control without encoder (frequency control) P100=3
MASTERDRIVES VCMaster drive (P587 = 0)
- r3 -
P127.M (80%)
R(rotor)Ktmp
KK148
n/f(ist)
n/f(ist)
r218
Smooth.n/f(act)
P223.M
P443.B
KK
Src main setpoint
P462.F (10 s)
Accel Time
P464.F (10 s)
Decel Time
n/f(set)
r482
n/f(set,smooth)
r229
P453.F (-110,0%) *
)
n/f(max,neg.spd)
n/f(max,pos.spd)
P452.F (110,0%) *
)
–
P235.M
n/f-Reg.Kp1
K0155
i-Anteil
K0153
Msoll,reg
Scal.T(pre)
P471.M (0)
K0165
T(set,limitr)
r269
x
y
Volt.
Mod.
Depth
Asyc.
Mot. 3~
Torque limitation
P240.M
n/f-Reg.Tn
P339.M *
)
ModSystem
Release
Tn
P284.M
Kp
P283.M
K0184
Isq(act)
Kp
P283.M
Tn
P284.M
Isd (act)
–
–
K0168
Isq(set)
+
KK188
Slip frequency
Current
model
EMF
model
KK199
f(set,stator)
–
P315.M
EMF Reg.Kp
P316.M
EMF-Reg.Tn
Smooth Vd(act)
P287.M
Setpoint channel Speed controller Torque/current limit Current controller Gating unit
Note:
The current injection of
P278 T(droop) (Fig. 382)
is only calculated for
frequencies below approx. 10%
of the rated motor frequency.
Sheet 316 Sheet 317 Sheet 319 Sheet 362 Sheet 367 Sheet 372 Sheet 390
Sheet 381
Sheet 396
Sheet 285
KK075
r014
Setpoint speed
+
Sheet 318
K0172
TorqLimit1,act
K0173
TorqLImit2,act
P433.B (0)
KK
Src Add. Setp1
Sheet 351
P499.B (171)
K
Src TorqLimit2
K171
P493.B (170)
K
Src TorqLimit1
Src TorqLimit1 FSetp
P492.F (100%)
K170
Src TorqLimit2 FSetp
P498.F (-100%)
Sheet 382
*
)
Parameter can only be
changed in the "Drive setting"
status (P60=5)
i-comp.
max.mod. depth r346
ModDepth Headrm
P344.M
Field weak. charac.
T(droop) P278.M
T(dynam.) P279.M
Smoothing I(set) P280.M
Start-up time
P116.M
Pw,max(gen)
P259.M
r129
Ref.
frequency: P352 *)
speed: P353 *)
torque: P354 *)
P354 is referred to
P113 *)
N
3
6
2
n957.88 = 0
Maximum current
P128.M