Simrad AP50 Autopilot
116 20222410 / B
7.2 Analog rudder control
For analog rudder control, no rudder angle signal is sensed by
the autopilot. Missing rudder response can therefore not be
detected immediately and displayed. As described on page 118,
this may result in “Vessel of course” alarm although the fault
may be in the rudder control system.
For component references refer to the JD5X Analog Board,
Component layout,
Figure 2-22.
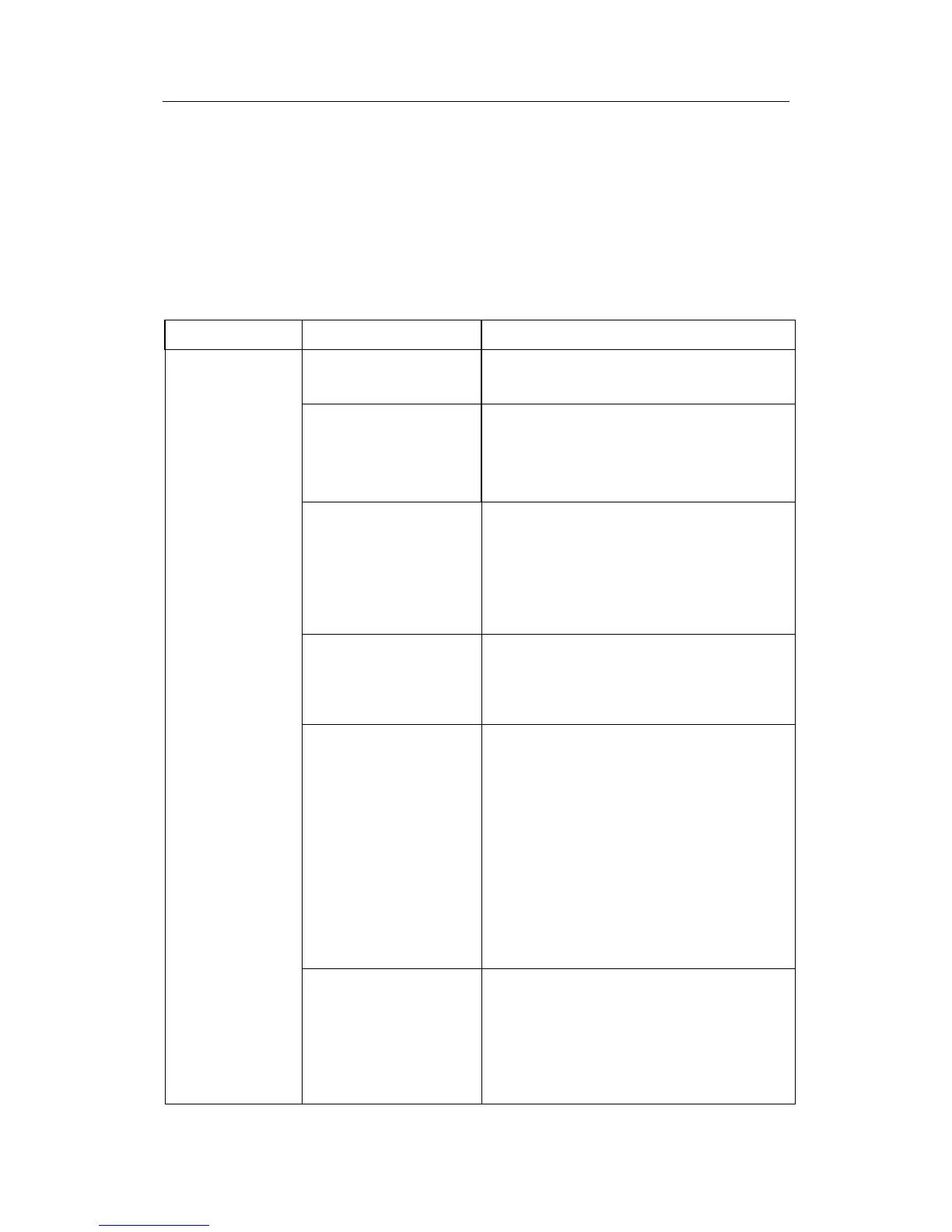
Display readout Probable fault Recommended action
No power to the JD5X
Analog board.
Check for 26-40V DC between J1-7 and
J1-9 (ref. Figure 2-22).
Robnet
communication to
JD5X is broken.
Check connection between the J2
connector on the JD5X board and the
Robnet connector on the main computer
board, J1-12 to Bus+, J1-14 to Bus–.
CPU on JD5X Analog
board has stopped due
to severe power
transient, software
lockup or defective
electronics.
Check LED for “CPU running”. If it
alternates with 1 Hz the board operates
OK. If the LED is permanently on or off,
switch power off and on to restart.
JD5X Analog Board
has been set for wrong
operation.
Check correct setting of dip switch SW1
(ref. page 27). If two boards are installed,
only one must be set to operate as Analog
Interface.
Improper or missing
reference voltage for
analog control signal.
Check correct setting of S1 to S4.
For voltage control with external
reference, check voltage at TB20 and
TB22 pin 3 and 4 (ref.
Figure 2-18)
For ±10V or 4-20mA control check
internal ±12V:
+12V between S1-left and TB20-2.
–12V between S2-left and TB20-2.
+12V between S3-left and TB22-2.
–12V between S4-left and TB22-2.
No rudder
response
(Remains in
actual mode
without any
rudder
command)
Open analog control
line.
Check for correct setting of switch S1 to
S4.
Check that the LED D700 is on.
Measure presence of analog voltage or
current signal on relevant terminal list
(ref. Figure 2-17 to Figure 2-19).