Y070.020/GB Page 31
Operation instructions
SIPOS 5 PROFITRON, HiMod
5
Commissioning
5 Commissioning
5.6 End positions adjustment for version with signaling gear
PROFITRON actuators are either available with signaling gear or as „non-intrusive“ version with
the non-intrusive position encoder. End position adjustment for HiMod and PROFITRON with the
non-intrusive position encoder is described in chapter 5.7.
5.6.1 General
If actuators are delivered mounted to a valve, this step has usually been done in the valve
manufacturer’s factory. The setting has to be checked during commissioning.
For the part-turn actuator 2SG5…, the signaling gear ratio does not have to be set. The actuator
is not equipped with an adjustable signaling gear. Continue with chapter 5.6.3.
Position recording function principle
By setting the signaling gear ratio and the end positions, it is ensured that the length, as well as
start and end of the valve travel (end positions OPEN and CLOSED) are correctly signaled to the
electronics .
Explanation
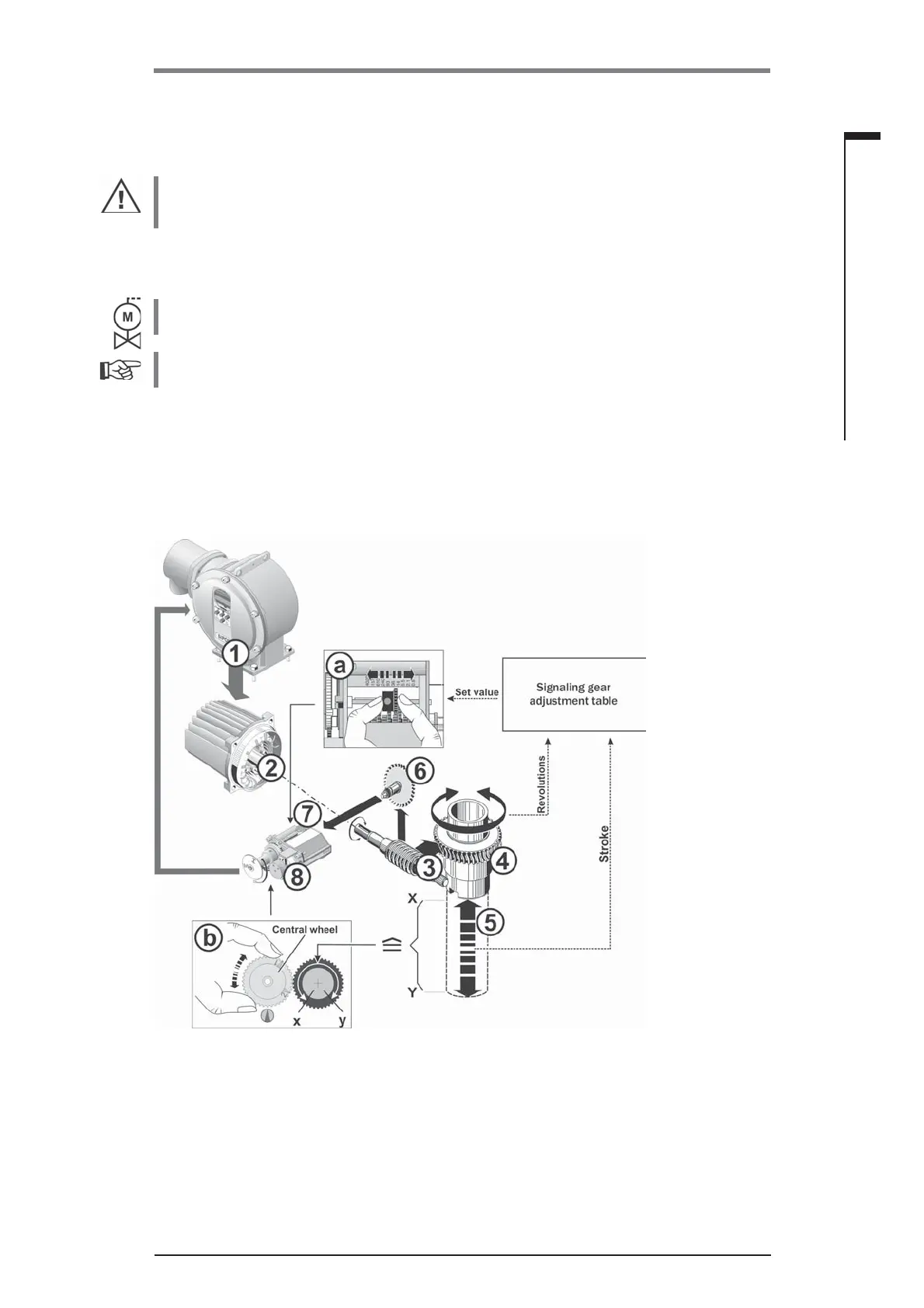
Fig.: Schematic representation of the signaling gear ratio and end position settings
The signaling gear (7) reduces the rotations of the output shaft (4) required for the complete travel
[(5) X –Y] to a rotary movement of ≤ 300° (max. rotation angle of the potentiometer or the magnetic
position sensor (x - y) (Setting (a), refer to following chapter, „Adjusting the signaling gear ratio“).
From the position of the potentiometer or the magnetic position sensor (for reasons of simplicity,
only called potentiometer in the following), the electronics recognizes the position of the output drive
shaft and therefore the position of the connected valve.
To this end, the potentiometer has to be set so that one of the mechanical end positions of the valve
(X or Y) corresponds to one limit of the electric setting range of the potentiometer (x or y) (Setting
(b), refer to the following chapter „Adjusting the end positions“.

 Loading...
Loading...