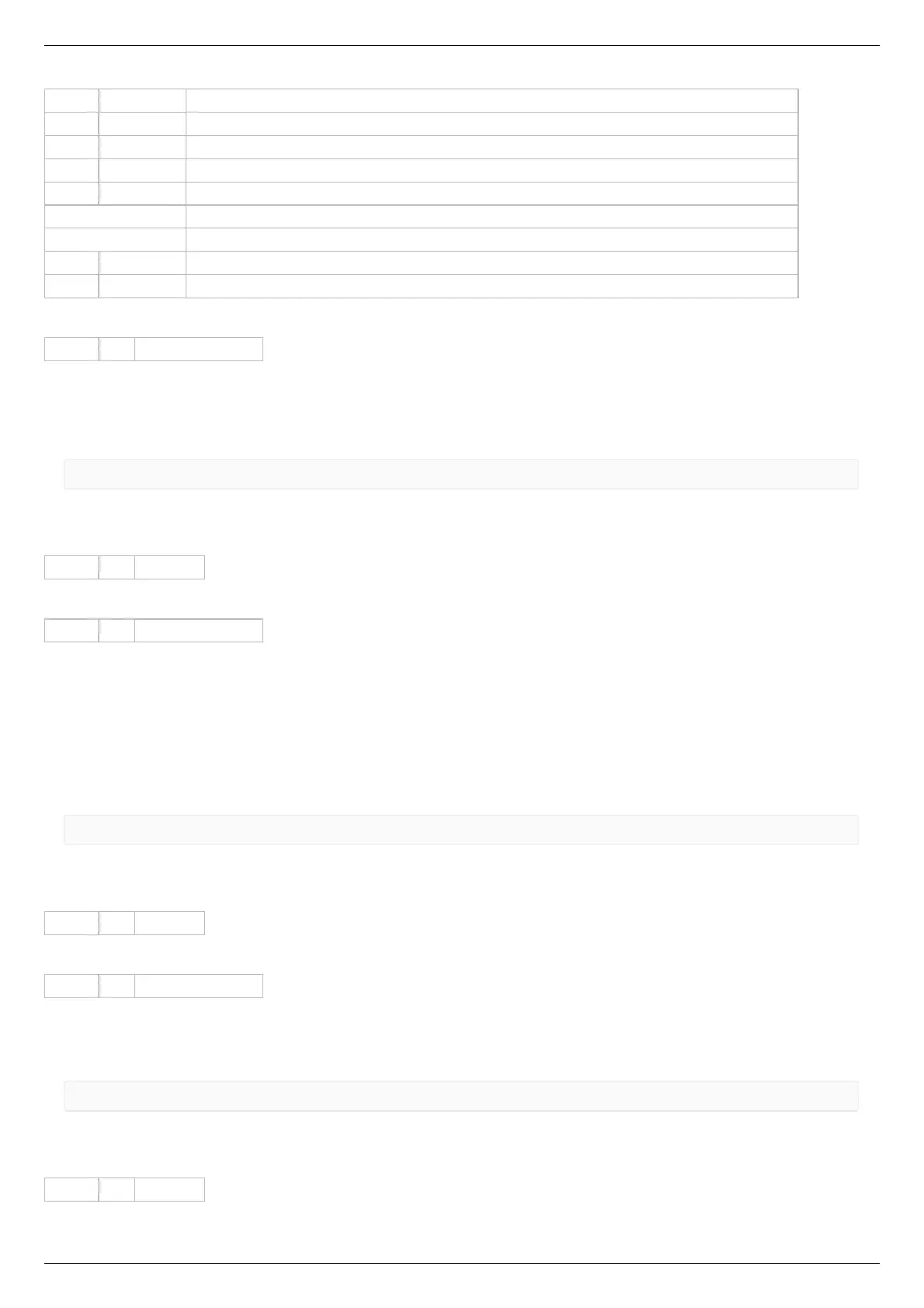
INT32U CMD Command
INT32S Position The position of the whole steps in the engine
INT16S uPosition Microstep position is only used with stepper motors
INT64S EncPosition Encoder position.
INT8U PosFlags Flags
0x01 - SETPOS_IGNORE_POSITION (Will not reload position in steps/microsteps if this flag is set.)
0x02 - SETPOS_IGNORE_ENCODER (Will not reload encoder state if this flag is set.)
INT8U Reserved [5] Reserved (5 bytes)
INT16U CRC Checksum
Answer: (4 bytes)
INT32U CMD Command (answer)
Description:
Sets any position value in steps and micro for stepper motor and encoder steps of all engines. It means, that changing main indicator
of position.
Command ZERO
result_t command_zero (device_t id)
Command code (CMD): "zero" or 0x6F72657A.
Request: (4 bytes)
INT32U CMD Command
Answer: (4 bytes)
INT32U CMD Command (answer)
Description:
Sets the current position and the position in which the traffic moves by the move command and movr zero for all cases, except for
movement to the target position. In the latter case, set the zero current position and the target position counted so that the absolute
position of the destination is the same. That is, if we were at 400 and moved to 500, then the command Zero makes the current
position of 0, and the position of the destination - 100. Does not change the mode of movement that is if the motion is carried, it
continues, and if the engine is in the "hold", the type of retention remains.
Group of commands to save and load settings
Command SAVE
result_t command_save_settings (device_t id)
Command code (CMD): "save" or 0x65766173.
Request: (4 bytes)
INT32U CMD Command
Answer: (4 bytes)
INT32U CMD Command (answer)
Description:
Save all settings from controller's RAM to controller's flash memory, replacing previous data in controller's flash memory.
Command READ
result_t command_read_settings (device_t id)
Command code (CMD): "read" or 0x64616572.
Request: (4 bytes)
INT32U CMD Command