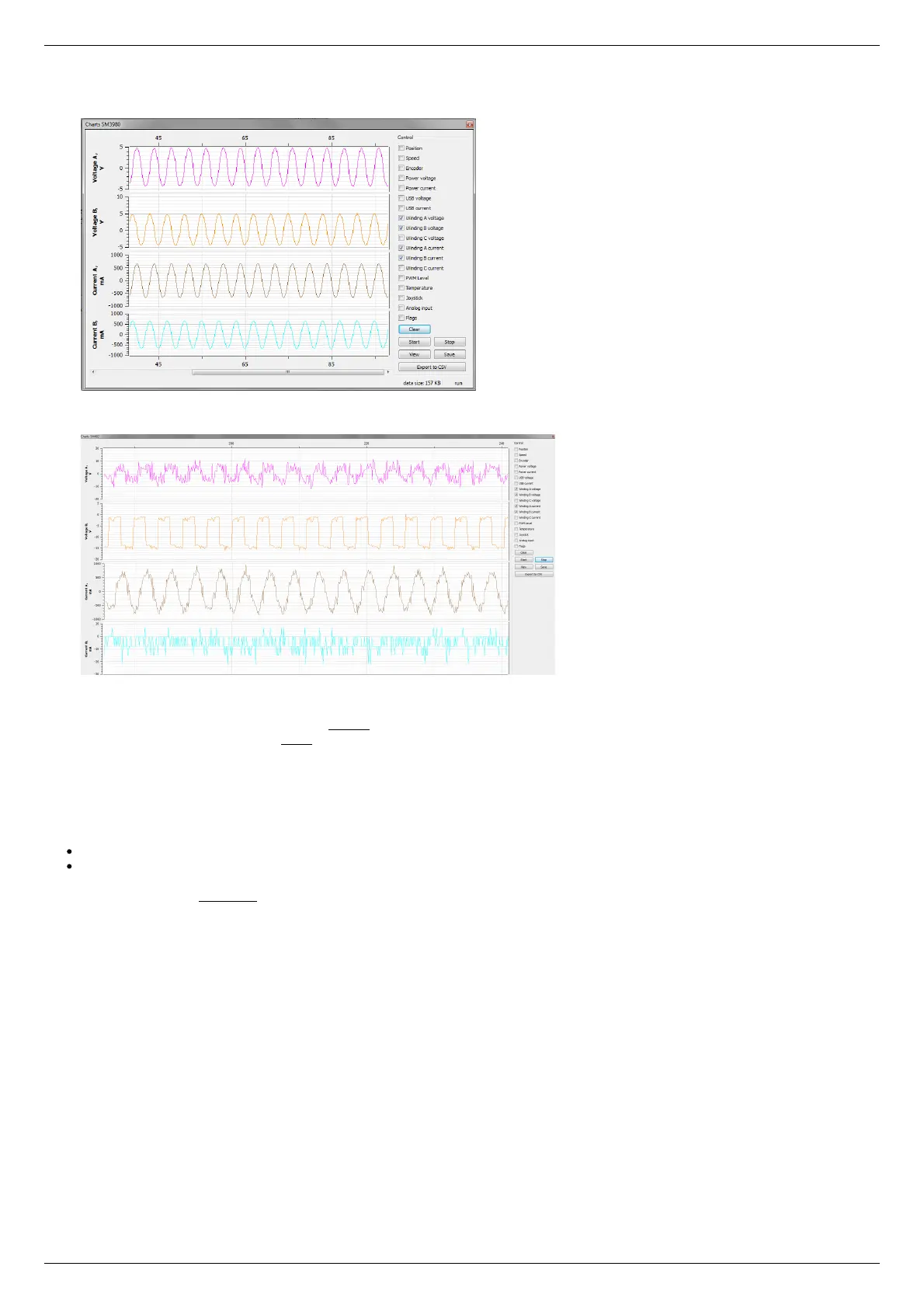
proper motor current in the winding varies according to a sine or cosine. In the broken motor much stronger differences of the
current from harmonic form can be noticed.
Working case
In the charts below you can see the problems. For example, winding B is open circuit. Probably it is broken. Also, voltage and
current forms are distorted.
There are problems with motor
To diagnose the problem set very low speed ( 1 s/sec is optimal) and send movement command. Then turn on graphs of current and
voltage for windings A and B in XiLab (button Charts, then mark correspond fields). Wait for a while until the graphs are built. Then it
is recommended to send them (Click Save in the same window with graphs) in technical support with a detailed description of the
problem. Sometimes, when winding is broken, it is impossible to use XiLab due to permanent loss of device. In this case also contact
technical support with description of the problem.
Mechanical jamming.
There are two ways to deal with jamming:
Turn the motorized stage by hands if it is possible.
Increase the winding current 2-3 times for a short time (about 5-10 seconds) and send movement command to the stage in the
right direction at the low speed (about 50-100 s/sec will be enough). A few seconds after rotation, press stop button (small
black square) until power off status appears in the main window of XiLab in order to prevent motor overheating. After this do
not forget to return the settings back!
When using the libximc library and Linux with kernel version less than 3.16, there are possible hanging of the
operating system
Comment: above-mentioned problem stems from the error in serial port driver cdc-acm. It is observed with frequent sequential
opening and closing of some devices. Operation system hanging was shown on Debian 7 (3.2 kernel version) and worked correctly on
Debian 8 (3.16 kernel version).
For additional information about problem please refer to the next link
Solution: update your current version of Linux.