42
MPC-385 SERIES OPERATION MANUAL – REV. 3.21K (20201120)
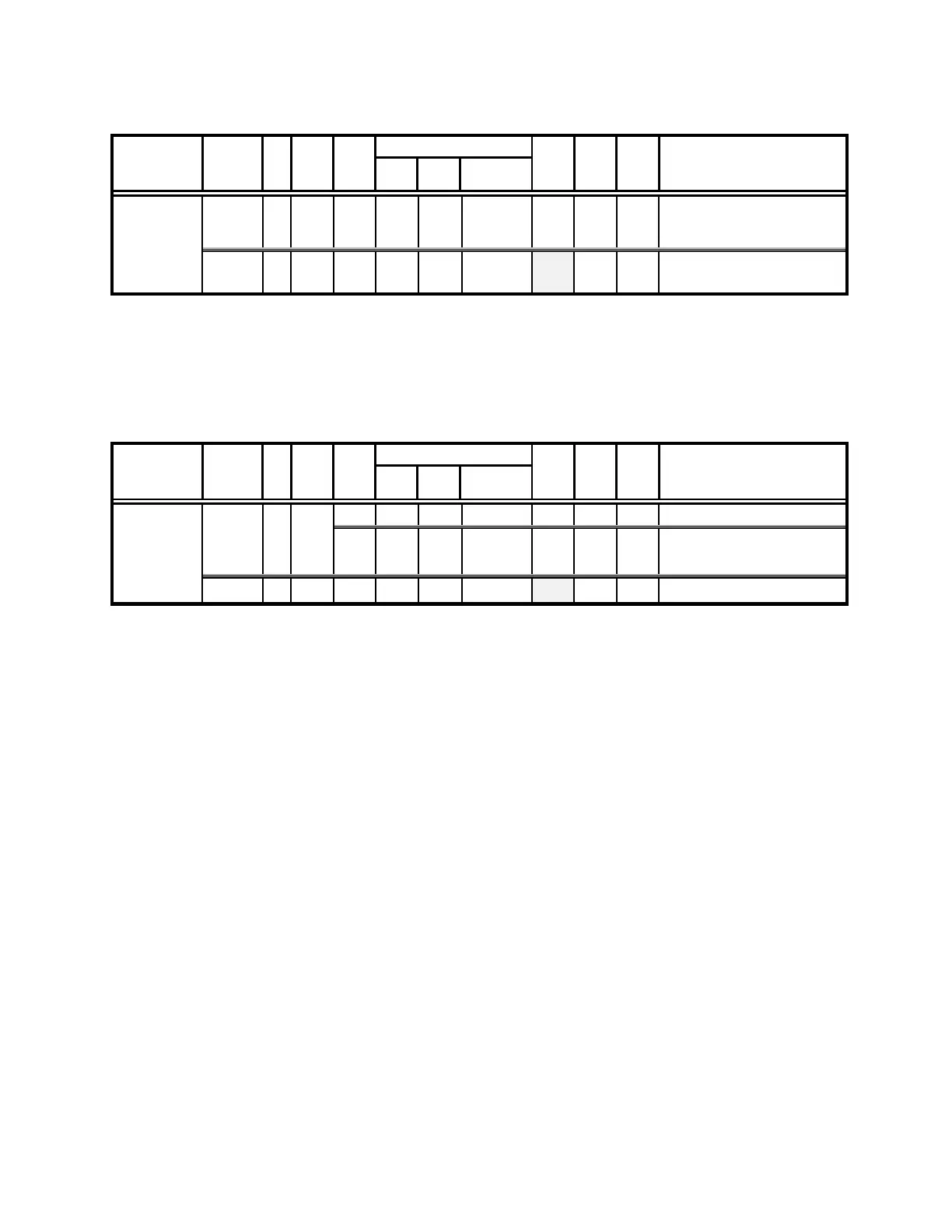
Table 5-19. Command to disable current-position streaming data during an ‘S’-command-initiated move.
Turn ON
S-Move
command
streaming
data (‘O’)
Command (see
‘S’ Command’s
Strea
ming Return Data for
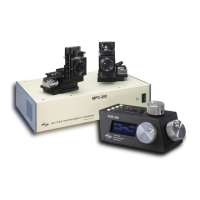
5.8.15 Set ROE MODE (‘L’) Command
Set ROE MODE (‘L’) Sets the ROE MODE (0 – 9). Command sequence consists of two bytes
(command byte and MODE (0 – 9)) and returns one byte (completion indicator).
Table 5-20. Set ROE MODE (‘L’) command.
-
–
Mode 0 - 9 (coarsest/fastest
to fi
nest/slowest)
Task-completion indicator
5.8.16 Command Notes
The following list of notes apply to all the external control commands described in this
chapter.
1. Task-Complete Indicator: All commands will send back to the computer the “Task-
Complete Indicator” to signal the command and its associated function in controller is
complete. The indicator consists of one (1) byte containing a value of 13 decimal (0D
hexadecimal), and which represents an ASCII CR (Carriage Return).
2. Intercommand Delay: A short delay (usually around 2 ms) is recommended between
commands (after sending a command sequence and before sending the next command).
3. Clearing Send/Receive Buffers: Clearing (purging) the transmit and receive buffers of the
I/O port immediately before sending any command is recommended.
4. Positions in Microsteps and Microns: All positions sent to and received from the controller
are in microsteps (µsteps). See
Microns/microsteps conversion
table) for conversion
between µsteps and microns (micrometers (µm)).
Declaring position variables in C/C++:
/* current position for X, Y, & Z */
unsigned long cp_x_us, cp_y_us, cp_z_us; /* microsteps */
double cp_x_um, cp_y_um, cp_z_um; /* microns */
/* specified (move-to) position for X, Y, & Z */
unsigned long sp_x_us, sp_y_us, sp_z_us; /* microsteps */
Use the same convention for other position variables the application might need.