10
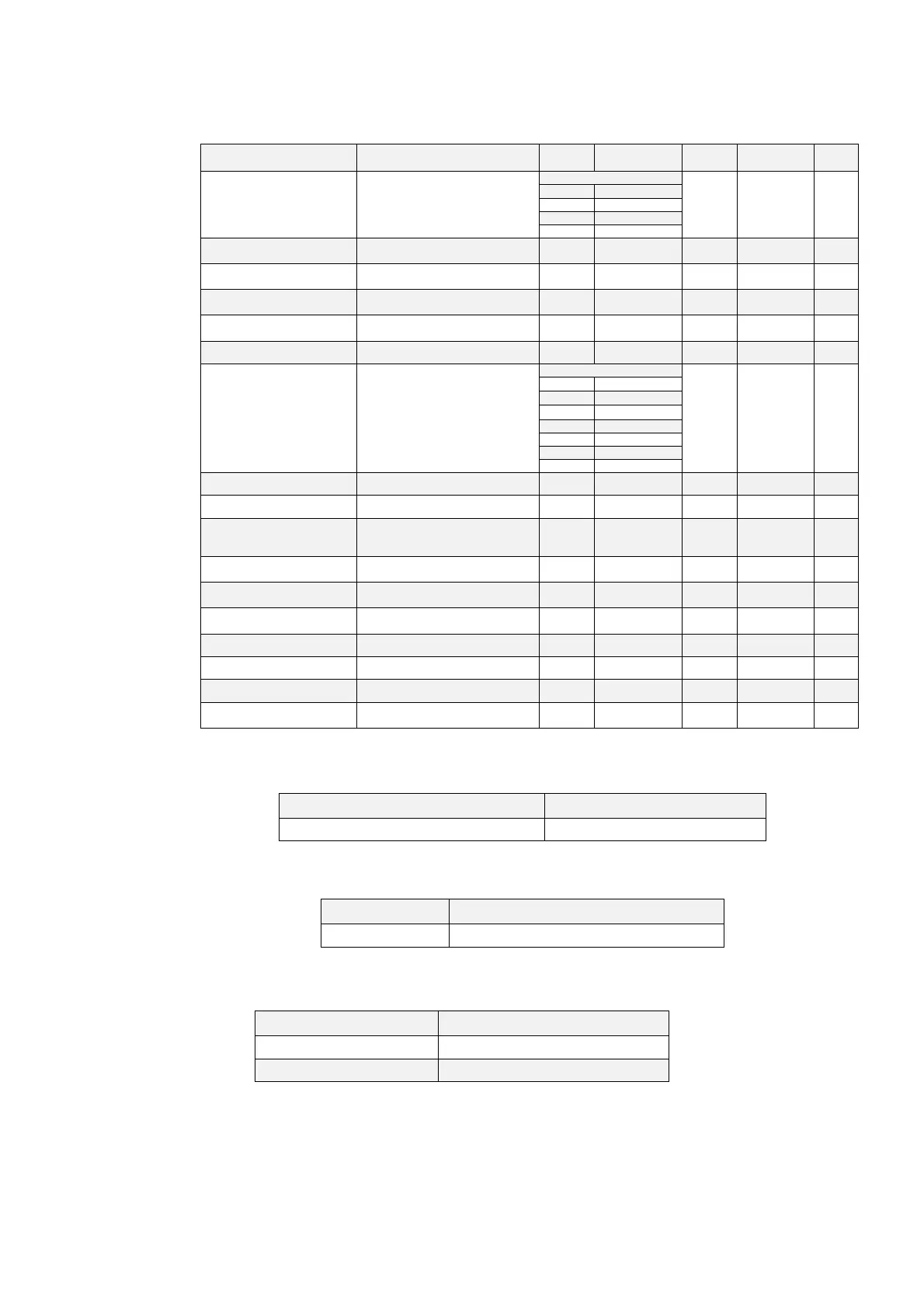
Name Description Min Max Default UM
Scal
e
SENSOR_SEL C00 - Speed sensor
Range
1 1
1 Encoder
4 Resolver
5 Resolver RDC
8 Sin/Cos incr
RES_POLE
P68 - Number of absolute sensor
poles
1 12 2 1
ENC_PPR
P69 - Number of encoder
pulses/revolution
0 60000 1024 pulses/rev 1
EN_TIME_DEC_ENC
C74 - Enable incremental encoder
time decode
0 1 0 1
RES_TRACK_LOOP_BW
P89 - Tracking loop bandwidth
direct decoding of resolver
100 10000 1800 rad/s 1
RES_TRACK_LOOP_DAMP P90 - D Traking loop bandwidth 0.00 5.00 0.71 100
RES_CARR_FRQ_RATIO C67 - Resolver carrier frequency
Range
0 1
-3
f PWM
8
-2
f PWM
4
-1
f PWM
2
0 f PWM
1 f PWM x 2
2 f PWM x 4
3 f PWM x 8
EN_SENSOR_TUNE C68 - Enable sensor auto-tuning 0 1 0 1
EN_INV_POS_DIR C76 - Invert positive cyclic versus 0 1 0 1
KP_SINCOS1_CHN
P164 - Resolver or Incremental
Sin/Cos sine and cosine signal
amplitude compensation
0.0 200.0 100 %
163.8
4
OFFSET_SIN1
P165 - Resolver or Incremental
Sin/Cos sine offset
-16383 16383 0 1
OFFSET_COS1
P166 - Resolver or Incremental
Sin/Cos cosine offset
-16383 16383 0 1
OFFSET_SINCOS_ENC
D38 - Compensation Sin/Cos
analog/digital term
0 pulses 1
SENSOR_FRQ_IN D39 - Input frequency 0 kHz 16
HW_SENSOR1 D63 - Sensor1 presence 0 1
SENS1_ZERO_TOP D55 - Sensor1 Zero Top 0 pulses 1
EN_SINCOS_PREC_POS
C70 - Enable SinCos Analog-
Digital compensation into position
0 1 0 1
For correct motor sensor setup is necessary to set the motor sensor present:
Name Description
SENSOR_SEL C00 - Speed sensor
and, for the specific sensor present, the following parameters.
For the TTL encoder and the incremental sin-cos encoder:
And for the resolver:
After that is necessary proceed with the auto tuning procedure.
Name Description
ENC_PPR P69 - Number of encoder pulses/revolution
Name Description
RES_POLE P68 - Number of absolute sensor poles
RES_CARR_FRQ_RATIO C67 - Resolver carrier frequency