29
User’s manual
The Startup time is the time necessary for motor and load to reach the maximum speed (set in P65)
with the nominal motor torque. This data has to be set in milliseconds in parameter P169.
It’s useful to set some milliseconds of filter (P168) on order to avoid too much noise on torque
reference for the time derivative.
When it’s enabled this function the torque reference produced is added to the speed regulator output.
The torque feed-forward can be very useful in the servo-drive application when the target is to follow
very promptly the speed reference, because it increases the bandwidth without using high gains on
speed regulator.
Note1: torque feed-forward isn’t appropriate in load variable inertia applications.
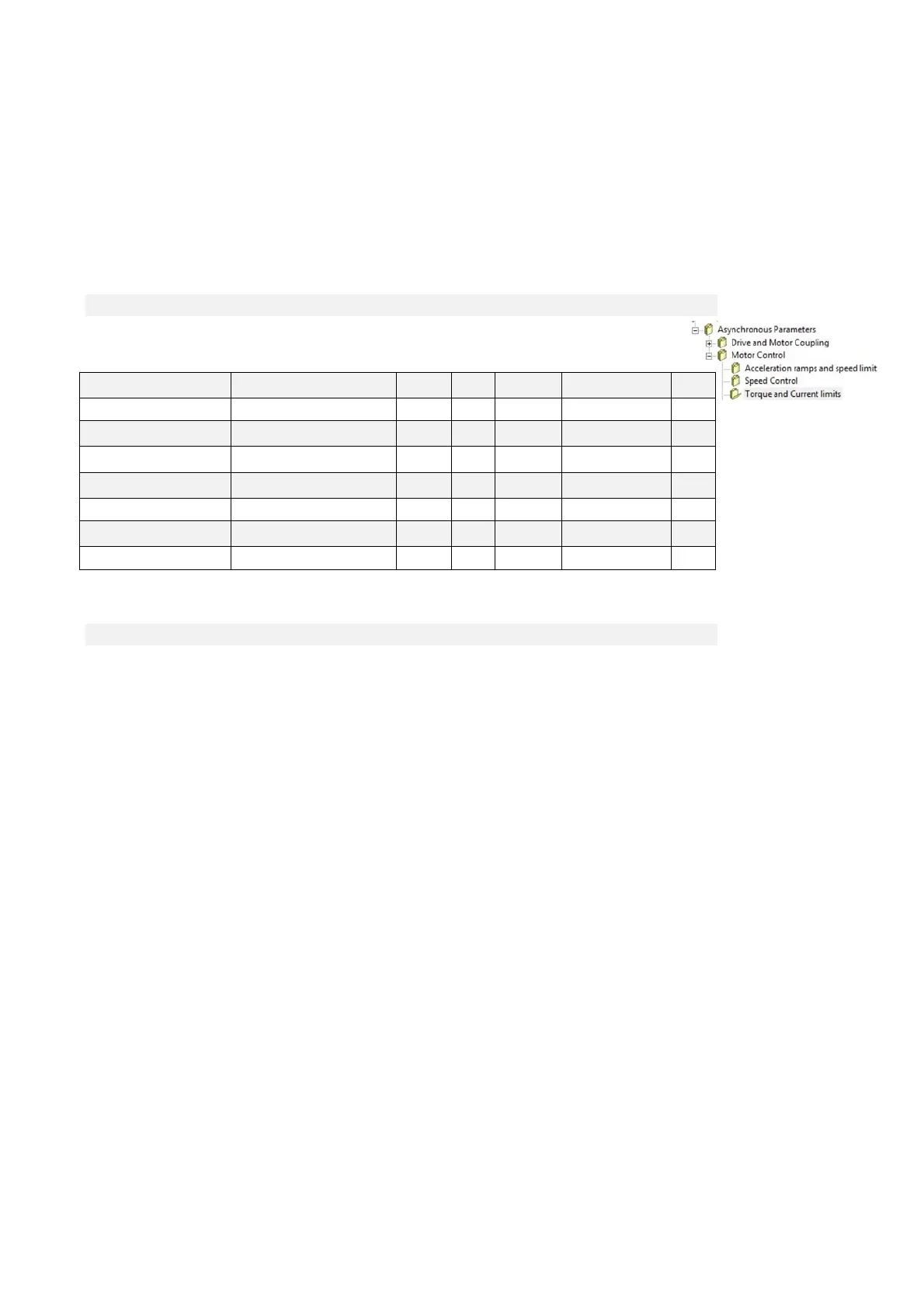
2.2.3 TORQUE AND CURRENT LIMITS
2.2.3.1 CHOOSING THE ACTIVE TORQUE LIMIT
The positive and negative torque limits are chosen to restrict the following values:
o P42 / P43 = maximum torque, in both directions according to rated torque;
o Maximum torque linked to maximum motor torque according to the rated torque
(parameter P41);
o Maximum torque set by the current limit;
o Maximum torque limit reference value generated by the application: sysMaxTorque
(symmetrical), sysMaxPositiveTorque and sysMaxNegativeTorque (asymmetrical)
o Maximum torque limited by the regulator output in order to back up the bus voltage
should the mains fail;
o Maximum torque controlled in the startup phase with the motor magnetized;
o Maximum torque limited in the controlled braking phase (as long as this function is
enabled by setting C47=1).
Name Description Min Max Default UM
Scal
e
PRC_DRV_I_PEAK P40 - Current limit 0.0 200.0 200 % DRV_I_NOM 40.96
PRC_MOT_T_MAX
P41 - Maximum torque at full
load
0.0 400.0 400.0 % MOT_T_NOM 40.95
PRC_DRV_CW_T_MAX
P42 - Maximum torque in the
positive direction of rotation
0.0 400.0 400.0 % MON_T_NOM 40.96
PRC_DRV_CCW_T_MAX
P43 - Maximum torque in the
negative direction of rotation
-400.0 -0.0 -400.0 % MOM_T_NOM 40.96
PRC_DRV_T_MAX D30 - Maximum torque -100 100 0 % MOT_T_NOM 40.96
PRC_DRV_I_T_MAX
D31 - Maximum torque by
current limit
-100 100 0 % MOT_T_NOM 40.96
PRC_DRV_I_MAX D29 - Current limit -100 100 0 % DRV_I_NOM 40.96