24
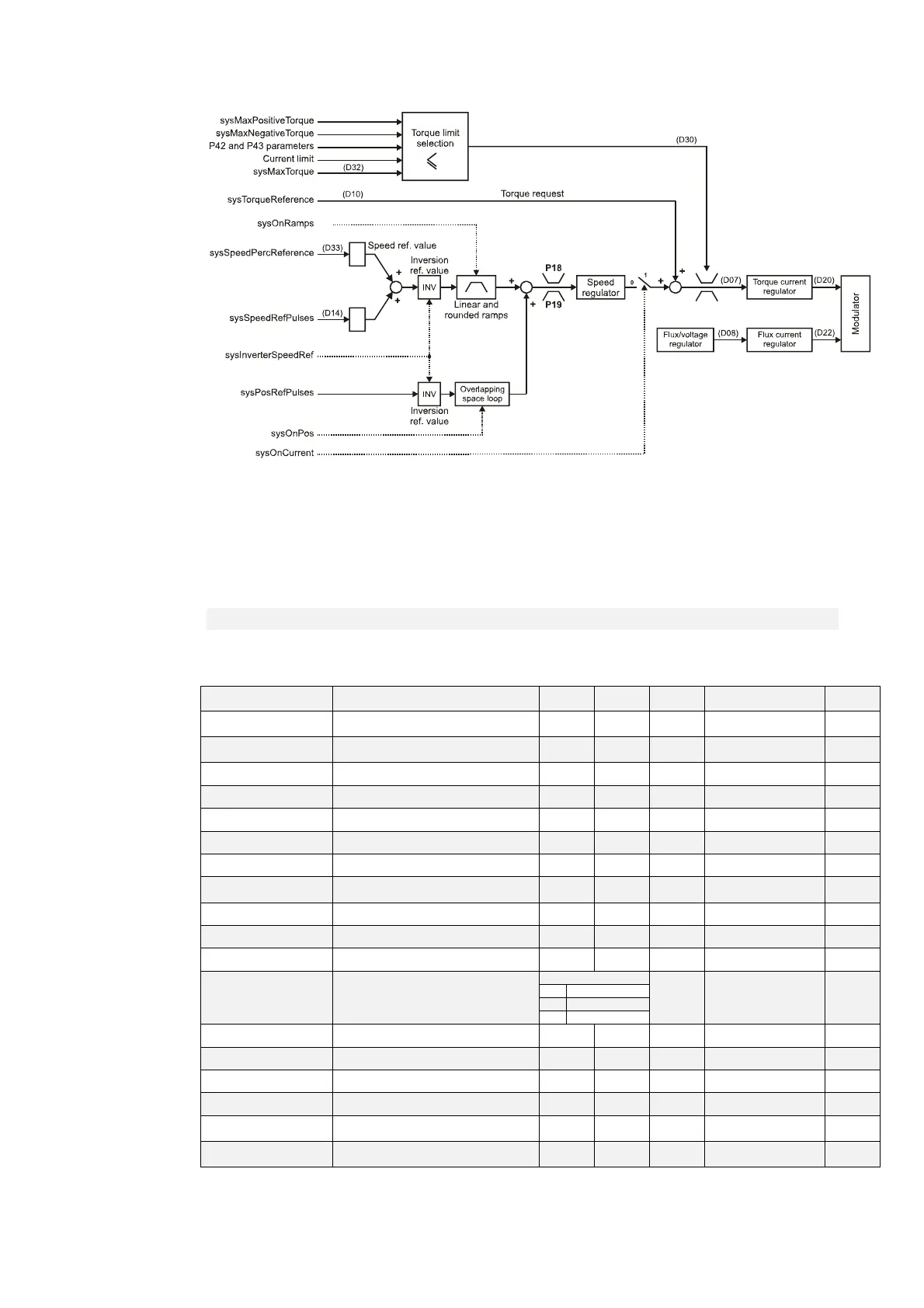
Regulation controls speed by default; here the application manages the speed reference values, and
the torque request is used as a reference value added to the speed regulator output (feed-forward).
Note that it is a torque control and not a current control, consequently during flux weakening the
control automatically generates the request for the active current needed to obtain the required
torque.
2.2.1 ACCELERATIO RAMPS AND SPEED LIMIT
Name Description Min Max Default UM Scale
PRC_CW_SPD_REF_
MAX
P18 - Max. CW speed reference value
limit
-105.0 105.0 105.02 % MOT_SPD_MAX 163.84
PRC_CCW_SPD_REF
_MAX
P19 - Max. CCW speed reference
value limit
-105.0 105.0 105.02 % MOT_SPD_MAX 163.84
CW_ACC_TIME P21 - CW acceleration time 0.01 199.99 10 s 100
CW_DEC_TIME P22 - CW deceleration time 0.01 199.99 10 s 100
CCW_ACC_TIME P23 - CCW acceleration time 0.01 199.99 10 s 100
CCW_DEC_TIME P24 - CCW deceleration time 0.01 199.99 10 s 100
TF_RND_RAMP P25 - Rounded filter time constant 0.1 20.0 5 s 10
DEC_TIME_EMCY
P30 - Emergency brake deceleration
time
0.01 199.99 10 s 100
EN_LIN_RAMP P236 - Enable linear ramp 0 1 0 1
EN_RND_RAMP C27 - Rounded ramp 0 1 0 1
EN_INV_SPD_REF P237 - Invert reference signal software 0 1 0 1
EN_DB C81 - Enable dead zones
Range
0 1
0 Not enable
1 Zone 1
2 Zone 2
DB1_START P179 - Dead zone 1 initial speed 0 30000 0 rpm 1
DB1_END P180 - Dead zone 1 final speed 0 30000 0 rpm 1
DB2_START P181 - Dead zone 2 initial speed 0 30000 0 rpm 1
DB2_START P182 - Dead zone 2 final speed 0 30000 0 rpm 1
PRC_TOT_APP_SPD_
REF
D02 - Speed reference value before
ramp
-100 100 0 % MOT_SPD_MAX 163.84
PRC_END_SPD_REF
D03 - Speed reference value after
ramp
-100 100 0 % MOT_SPD_MAX 163.84