28
w
I° II°
x2
x2
-40dB/dec
-20dB/dec
Useful area for
2nd order filter
By taking as reference the 1st order filter time constant tolerated by the system, the 2
nd
order filter
has to be set to double frequency (half time) so that it has the same phase margin.
The effects of the 2nd order filter will be better than the 1st order filter only when the frequency is
double that of the 2nd order filter.
Example: if a 1st order filter with a time constant P33=0.8 ms passes to a 2nd order filter, P33=0.4
ms has to be set to have the same stability margin.
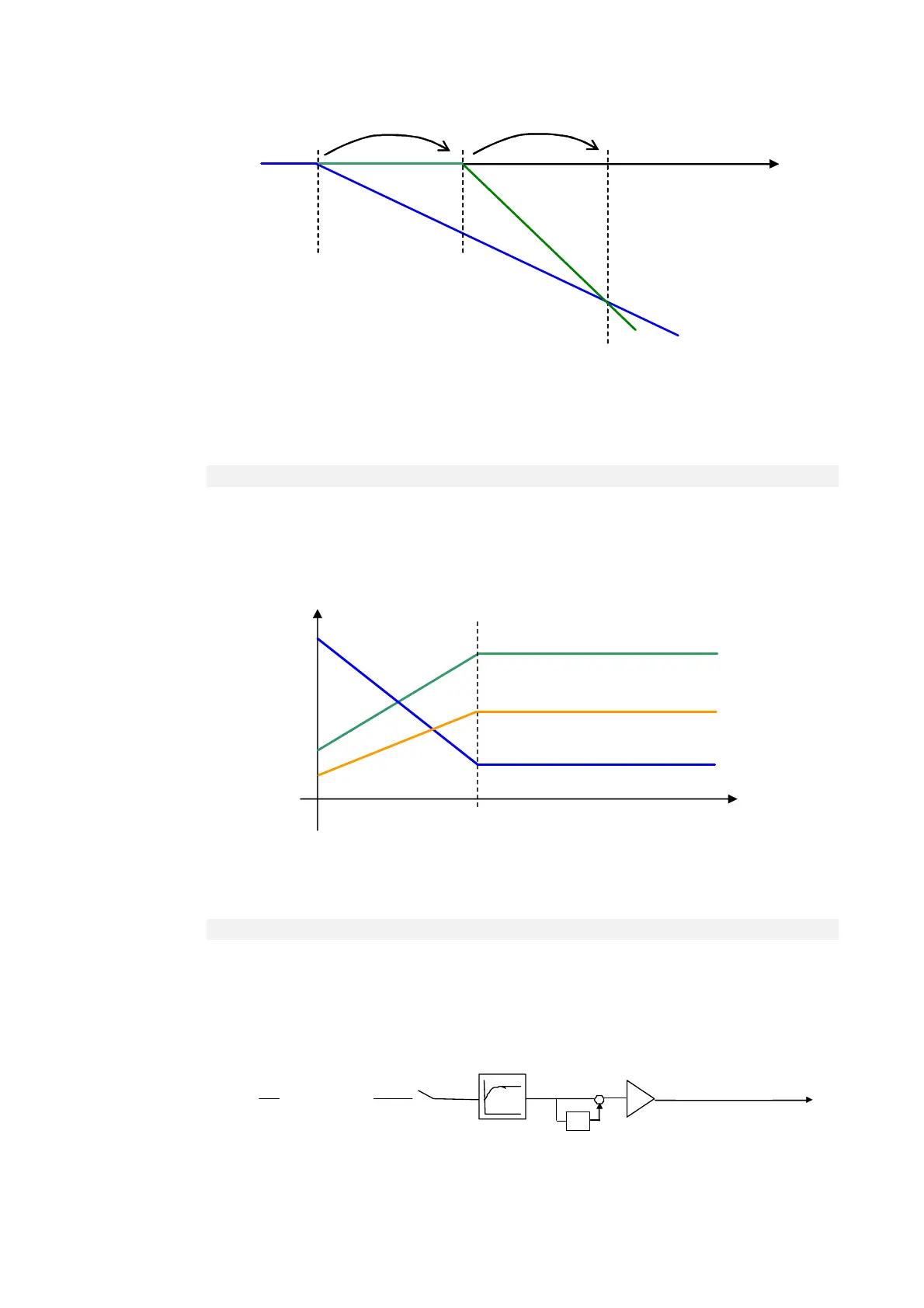
2.2.2.4 VARIABLE SPEED REGULATOR GAINS
Speed regulator gains can be varied according to actual speed: P45 is the proportional gain at zero
speed, P46 is the initial lead time constant and P34 is the initial filter time constant. Setting P44 (a
percentage of the maximum speed) with the end variation gain speed establishes a linear gain
variation that ranges from the initial values (P45,P46 and P34) to the final values in P31,P32,P33.
Setting P44=0.0 disables this function so that the gains set in P31, P32 and P33 are used.
speed in % of max speed
P44
P32
P31
P45
P46
Kp proportional gain
Ta lead time constant
P34
P33
Tf filter time constant
2.2.2.5 TORQUE FEED-FORWARD ON SPEED REFERENCE
It’s possible to enable the Torque feed-forward on speed reference using C72 connection:
It’ possible to estimate the torque reference needing for the speed variation requested with the speed
reference derivative using a II° order filter (time constant in P168 in ms) and taking account of total
inertia (setting parameter P169 Startup time).
C72 Speed refere nce t_r if
% Nominal motor tor
ue
1
τ = P168
P169
Z
1
-
+