– 29 –
To be
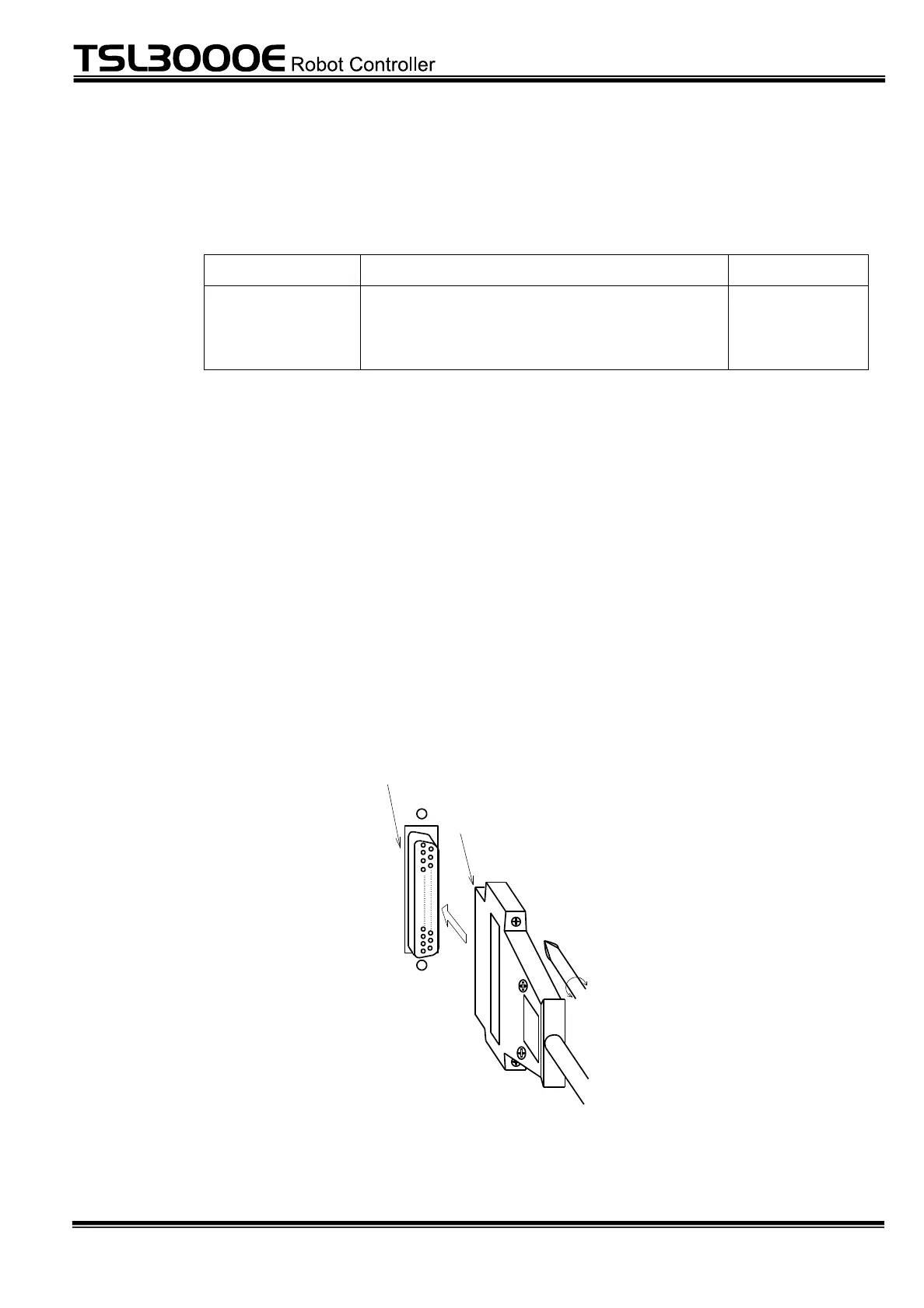
tightened
To be
loosened
Connector on cable side
D-sub
Connector
Connector on robot side
3.9.2 TVL Series Hand
a. The HAND connector on the robot side should be equivalent connectors.
JN2FS10SL2-R
(plug angle type connector)
JN1-22-22S-PKG100 (contact)
Japan Aviation
Electronics
Industry
b. Select the cables which meet the following specifications.
• Core wires : 0.2 mm
2
twisted wires
• Cable outer diameter : Max. 10 mm
• Shield : Batch braided shield
• Cable length : 30 m or less
NEVER use cables which do not conform to the specifications. Otherwise,
short-circuit or cable melting due to overheated cable core may be caused.
Additionally, the robot may work improperly due to noise.
3.10 Attaching and Detaching Hand I/O Signal Cable
Before attaching or detaching hand I/O signal cables to or from the robot, be sure to
turn off the main power in the user's control panel.
Fig. 3.11 Attaching and detaching hand I/O signal cable
 Loading...
Loading...








