– 26 –
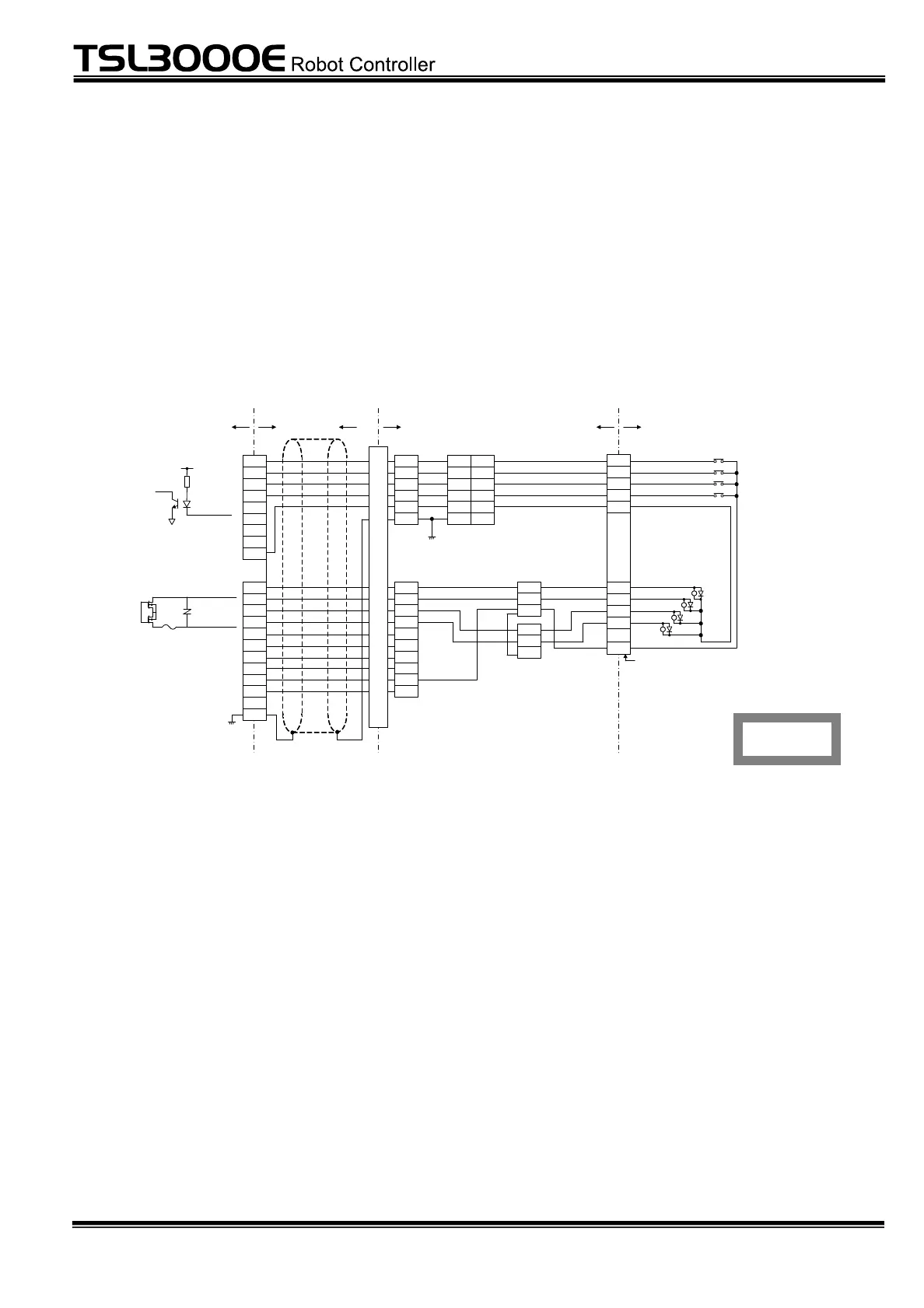
3.8 Connecting Hand I/O Signal Cable (TVL Series)
To use a user's special system, use the attached HAND motor drive power
connections on the robot side. The cables are not attached. Appropriate cables
should be used. When using this function, use of exclusive cables (option) is
recommended. For details, contact our after-sale service agent in your territory.
Connection for Type N
FG
Source type
(+ common)
( ): signal name of
DIN command and
DOUT command
A1
B10
P24V
1
Robot controller
HAND
Robot body
Cable connecting controller
and robot
B1
A2
B2
A3
B3
A4
B4
B5
A6
B6
A7
B7
A8
B8
A9
A5
A10
HIN
2
3
4
5
6
7
8
10
P24G
1
2
3
4
6
7
B9 9
FG
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
4
5
6
1
2
3
3
1
2
5
8
9
10
Recommended 10-pin canon connector part number:
Angle type: JN2FS10SL2-R*JAE
Contact: JN1-22-22S-PK100*JAE
* These connectors with cables (1 m or 2 m) can be provided
optionally.
User wiring
Cable Clamp
HAND
HIN HIN
HOUT HOUT1
HOUT2
(201)
(202)
(203)
(204)
(201)
(202)
(203)
(204)
P24G
SYSINCOM
Note: SYSINCOM is
connected to the 17 and
30 pins of the INPUT
connector.
SYSOUTCOM
Sink type
(- common)
Note: SYSOUTCOM is
connected to the 10 and
23 pins of the OUTPUT
connector.
Fig. 3.9 Connection of hand I/O signal cable (Type N)
 Loading...
Loading...








