3.6.2 Heading Observers
Gimbal heading (ie which way is North) is the most difficult state to observe, so Trillium has a
number of means to both speed up convergence and provide additional observations.
Course is Heading
For fixed wing installations, the GPS course is equal to the gimbal heading except for crab angles
and installation errors. Therefore, the GPS course can be used under certain conditions to speed up
convergence. To enable Course is Heading, enter the gimbal orientation as described above and
check Course Is Heading.
Nonlinear Heading
For hovering aircraft installations such as multirotors and helicopters, no assumption of Course is
Heading can be made. In this instance, a non-linear observer can be enabled to initialize heading
once the aircraft starts moving. To enable, enter the gimbal orientation as described above and
check Nonlinear Heading.
External Heading Observations
External heading observations are accepted including the UM7 magnetometer from Redshift Labs
and the Novatel Align Dual GPS system. To enable communications to these devices, select UM7
Mag and 115200 and/or Novatel GPS and 115200 in the Crown Serial Config page.
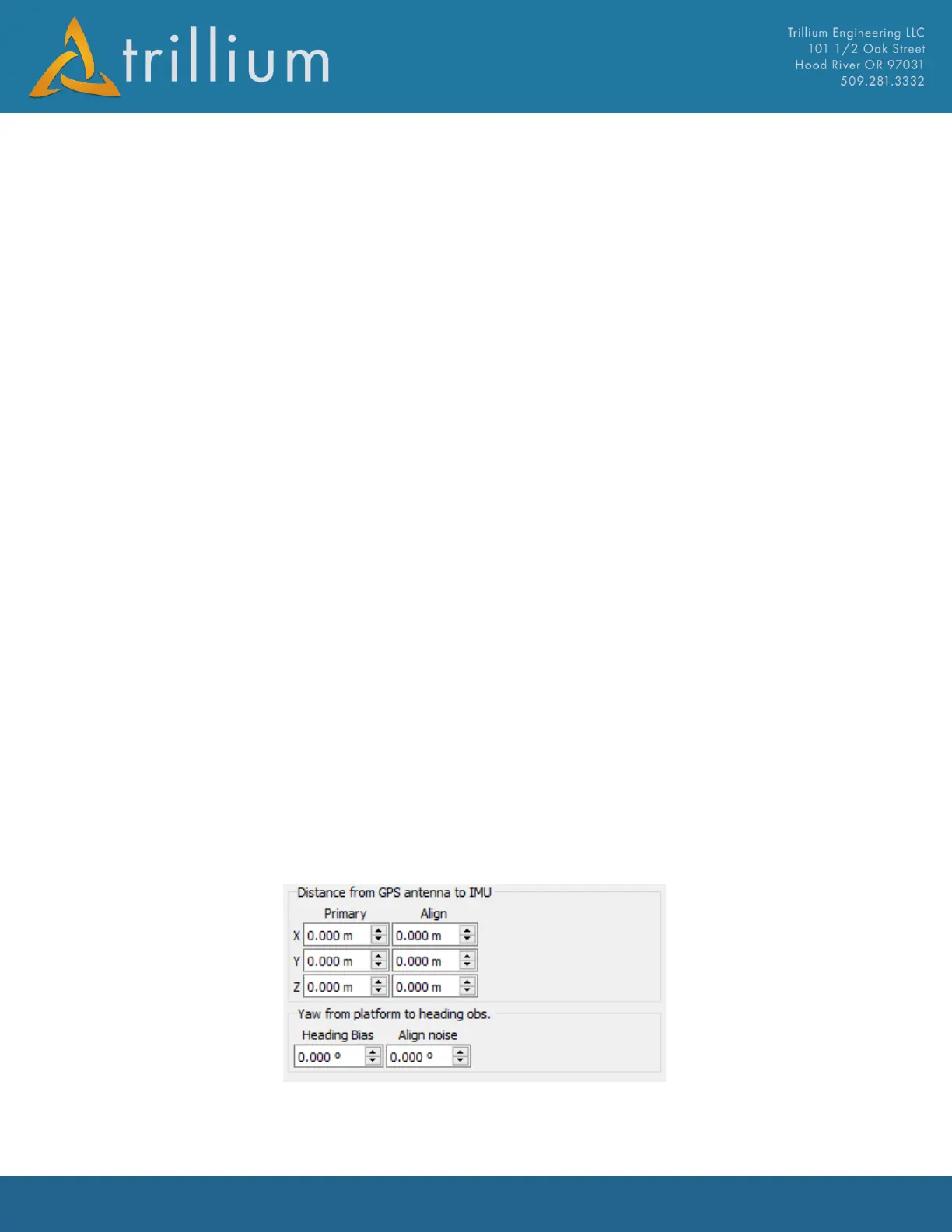
3.6.3 GPS Lever Arm
If the GPS antenna is located more than a meter from the gimbal, a GPS Lever Arm should be used to
increase accuracy. The GPS lever arm is in meters and is defined as X, Y, Z meters from the GPS
antenna to the gimbal in the platform reference frame. If a Novatel dual antenna heading unit is
used, the offsets from both the primary and secondary Align antenna need to be defined.
Yaw from Platform to Heading Observation
Depending on the orientation of the dual GPS antennas or the magnetometer, an offset may be
necessary to correctly set heading. One way to test the offset in a given installation is to geopoint to
a known location while the gimbal is static. The Yaw value can then be changed until the gimbal is
pointing at the correct location.