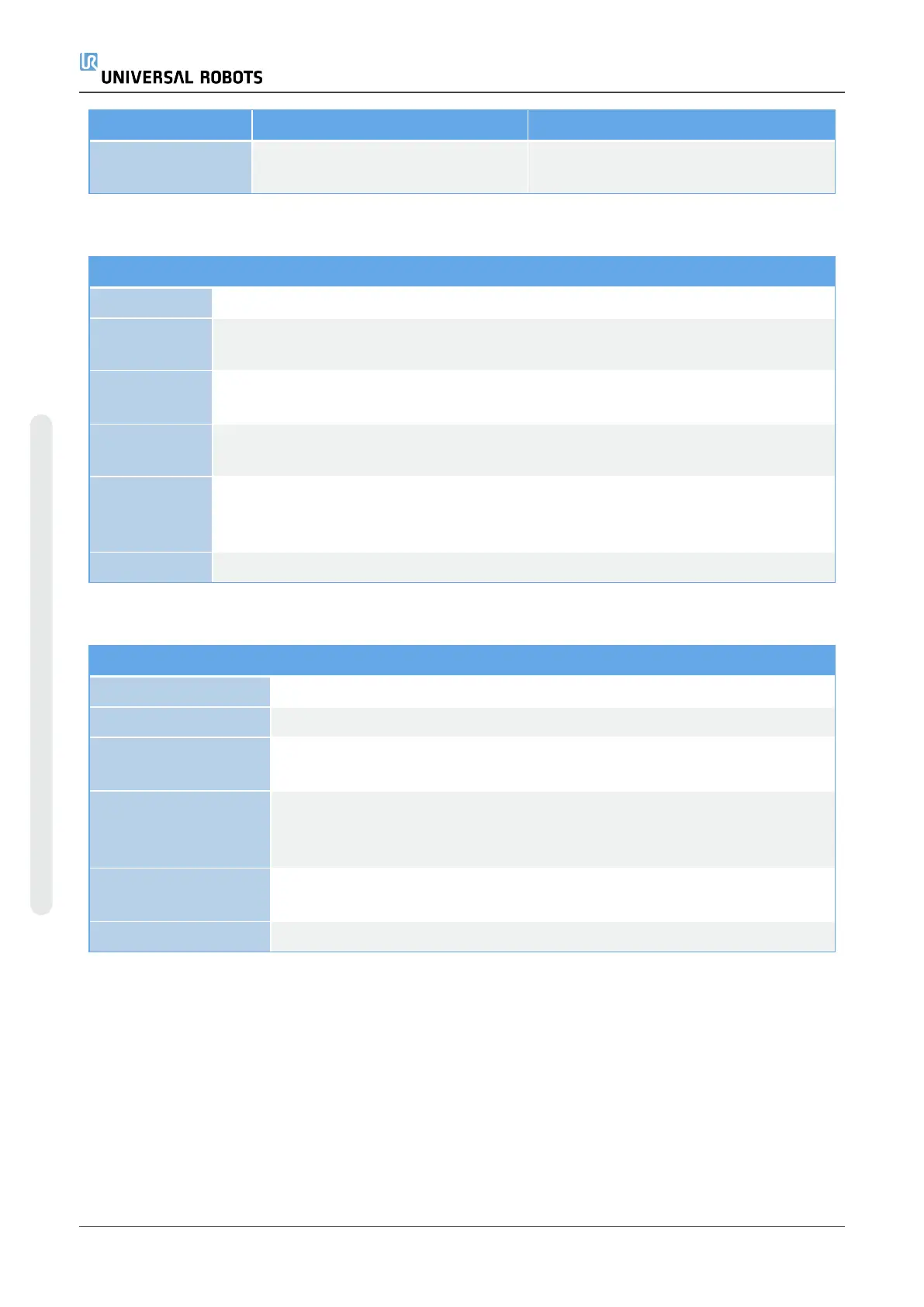
URSafety function Cat./PL PFHd
Safe guard
stop
3/d 2.01E-7
Safety function 1
Emergency stop: Bidirectional
Name Emergency stop.
Type UR robot: Stop category 1 according to per IEC 60204-1.
IMM: See IMM documentation.
Triggering
event
UR robot: Emergency stop push-button is pressed; stop triggered by IMM.
IMM: See IMM documentation.
Reaction UR robot: Stop category 1 according to per IEC 60204-1.
IMM: See IMM documentation.
Safe state UR robot: Drive power to the robot is removed; stop is initiated to the IMM through
the IMMI.
IMM: See IMM documentation.
Intended use Stop all hazardous machine functions and remove power.
Safety function 2
UR safeguard stop input from the IMM
Name Safeguard stop.
Type For safeguarding (protection) of personnel from IMM risks.
Triggering event The IMM safeguard outputs change state, thereby triggering a safeguard
stop to the UR robot.
Reaction and
behavior on power
failure
Robot stops upon loss of power to the UR robot.
See IMM documentation to determine reaction of IMM and the safeguard
upon loss of power to the IMM or the IMM safeguard.
Safe state Robot is not moving and is in a monitored-standstill state (stop category 2
according to IEC 60204-1.
Intended use IMM Safeguarding.
e-Series Injection Molding Machine
Interface (IMMI)
6 Installation Guide
2.Safety
Copyright © 2019–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












