8.2.2. Using the IMMI template
To use the IMMI template
1. On PolyScope, in the Header, tap Program and select IMMI.
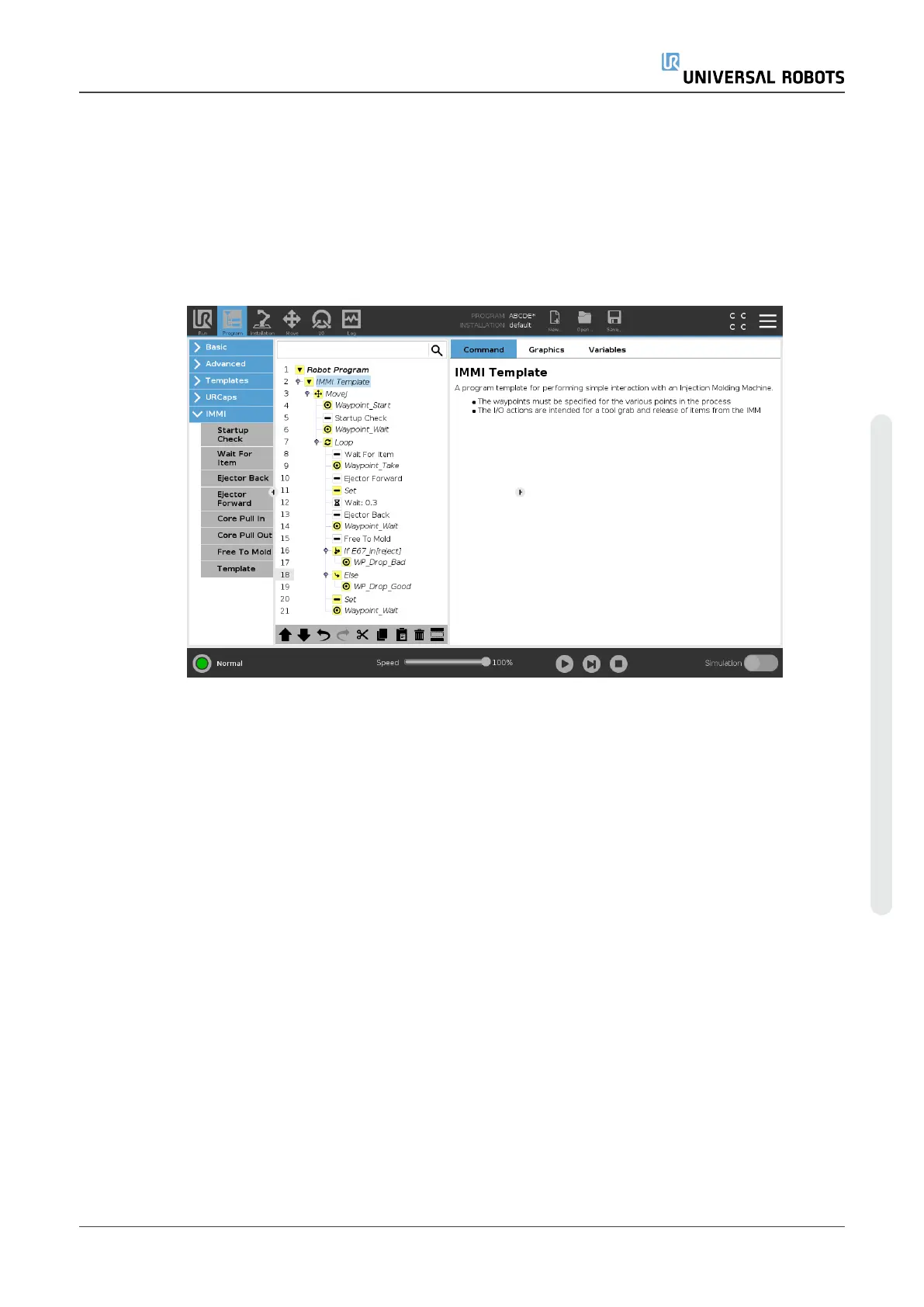
2. Select Template for the program screen to appear with the template loaded. The template
structure is visible on the left side of the screen, as illustrated below.
3. To prepare the robot for handling objects, select desired waypoints from the following:
•
Waypoint_Start: Robot arm start point before the injection molding process begins.
•
Waypoint_Wait: Robot arm wait point.
•
Waypoint_Take: Robot arm remove item from IMM point.
•
WP_Drop_Bad: Robot arm release rejected item point.
•
WP_Drop_Good:Robot arm release accepted item point.
4. Select and customize one of the following nodes to control the gripper:
•
Set: Determine when the tool grips and releases an item.
•
Loop: Run the robot only when an item must be removed from the IMM.
•
MoveJ: Adjust the robot movement speed to fit the IMM cycle time.
5. In the Move node, adjust the Joint Speed and Joint Acceleration to accommodate item
fragility.
Installation Guide 23
e-Series Injection Molding Machine
Interface (IMMI)
8.IMMI module programming
Copyright © 2019–2021 by UniversalRobotsA/S. All rights reserved.

 Loading...
Loading...












