19.10. URCaps
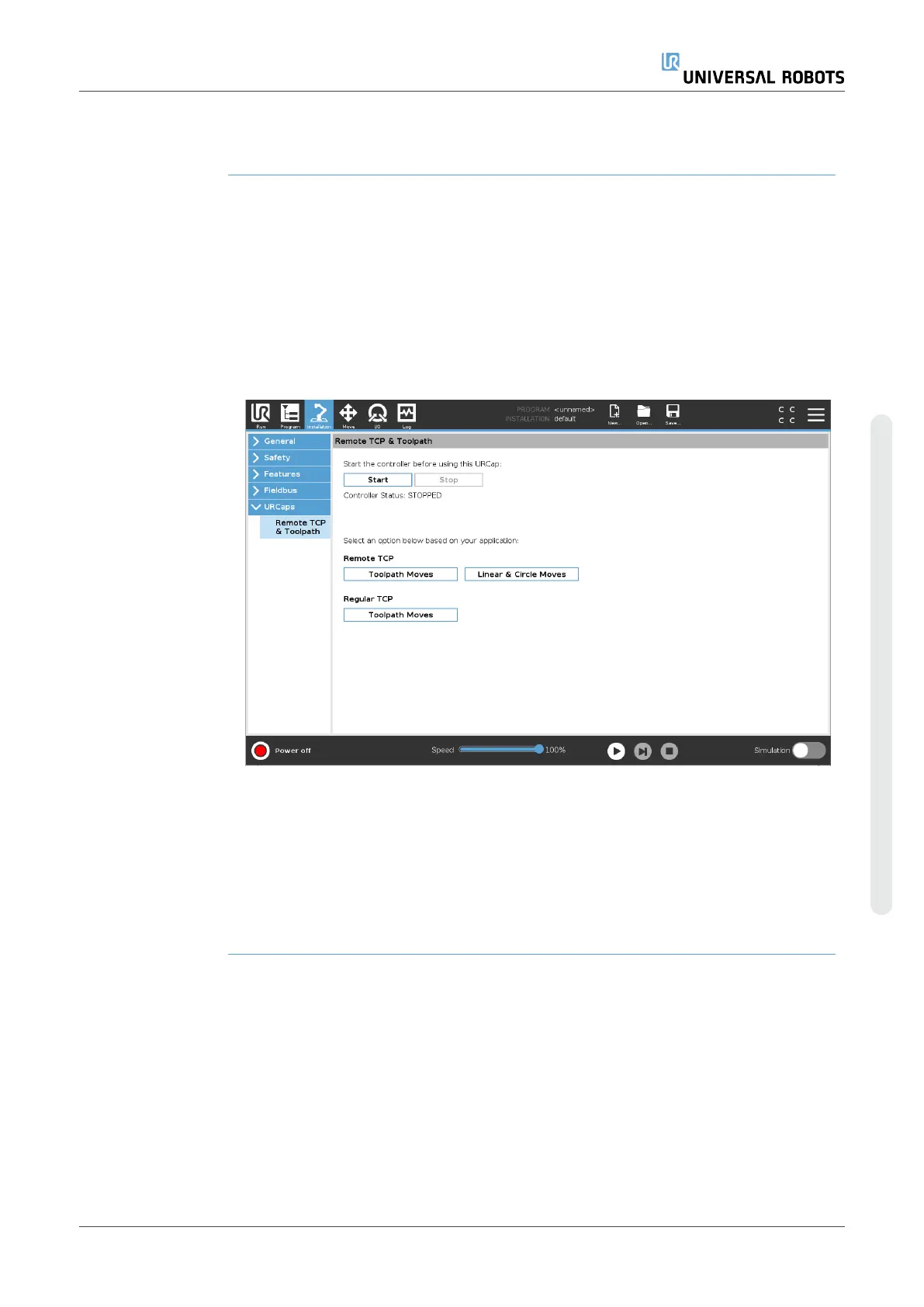
Description The Remote TCP and Toolpath URCap allows you to set Remote Tool Center Points
(RTCP), where the tool center point is fixed in space, relative to the base of the robot.
The Remote TCP and Toolpath URCap also allows for programming waypoints and
circle moves, and generating robot motion based on imported toolpath files defined in
third-party CAD/CAM software packages.
The Remote TCP URCap requires your robot to be registered before use (see Robot
Registration and License fileon page340). The RTCP works in applications that
require the robot to grasp and move items, relative to a fixed tool. The RTCP is used
together with the RTCP_MoveP and RTCP_CircleMove commands to move a grasped
part with constant speed, relative to the fixed tool.
Similar to a regular TCP (see ) you can define and name an RTCP in the Installation
Tab’s Setup.
You can also complete the following actions:
•
Add, rename, modify, and remove RTCPs
•
Understand the default and active RTCP
•
Teach RTCP position
•
Copy RTCP orientation
User Manual 269 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.