Continuous Pulse
Alternates between high and low Running
(pause or stop
the program to
maintain the
pulse state)
Program
Termination
Cause
NOTICE
A program is terminated unscheduled if any of the following occur:
•
Robot stop
•
Fault
•
Violation
•
Runtime exception
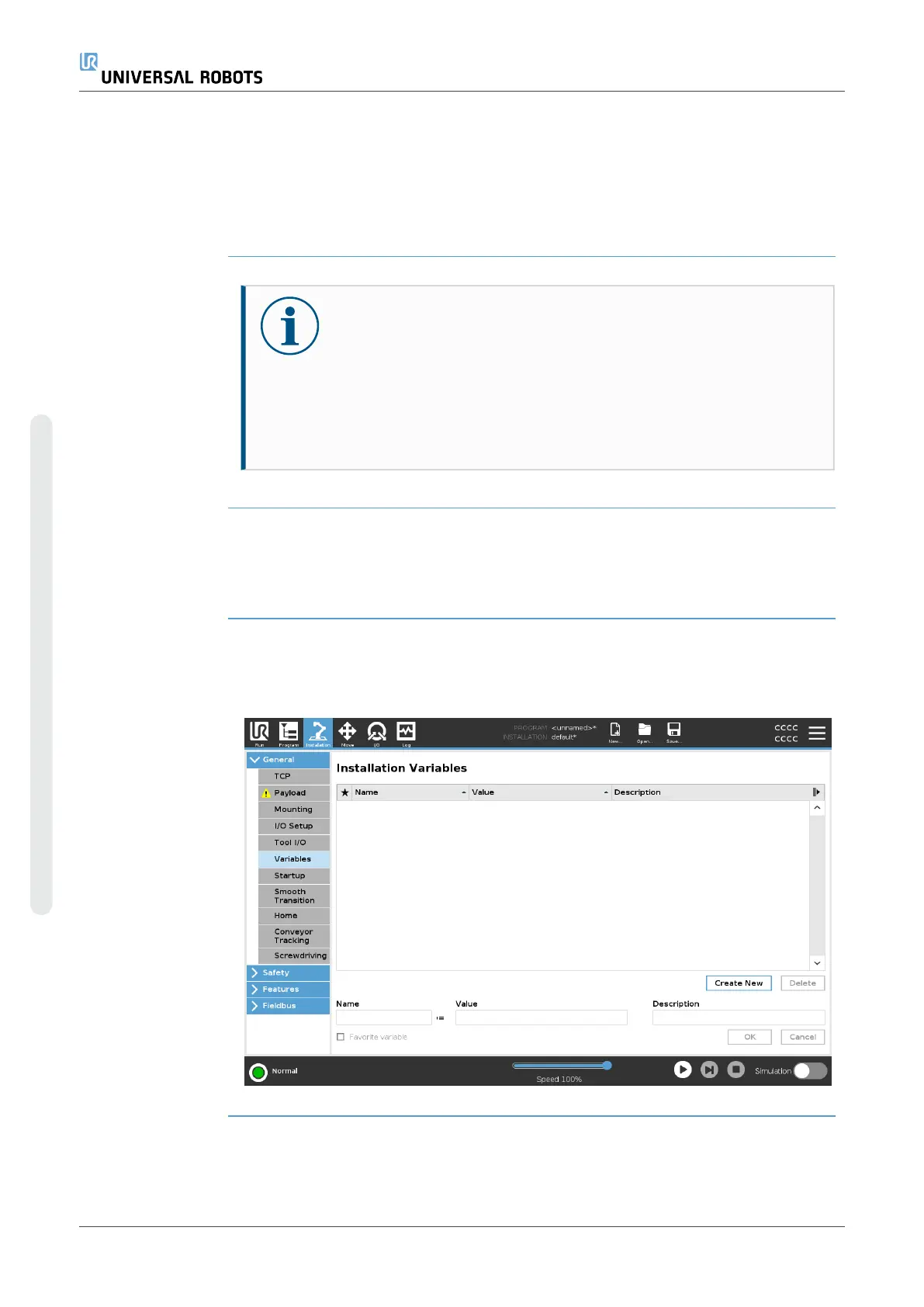
20.5. Installation Variables
Description Variables created on the Installation Variables pane are called installation variables
and are used like normal program variables. Installation variables are distinct because
they keep their value even if a program stops then starts again, and when the robot
arm and/or Control Box is powered down and powered up again.
UR10e 288 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.