All rights reserved 32 Servicemanual_UR10_en_3.1.3
3.1.15 Instructions for calibrating a joint
After replacement calibration of the new joint is required in order to find the correct zero position.
If it is possible and necessary, perform the 3.1.16 Dual Robot calibration alternative perform a joint
calibration.
Instructions for calibrating a joint:
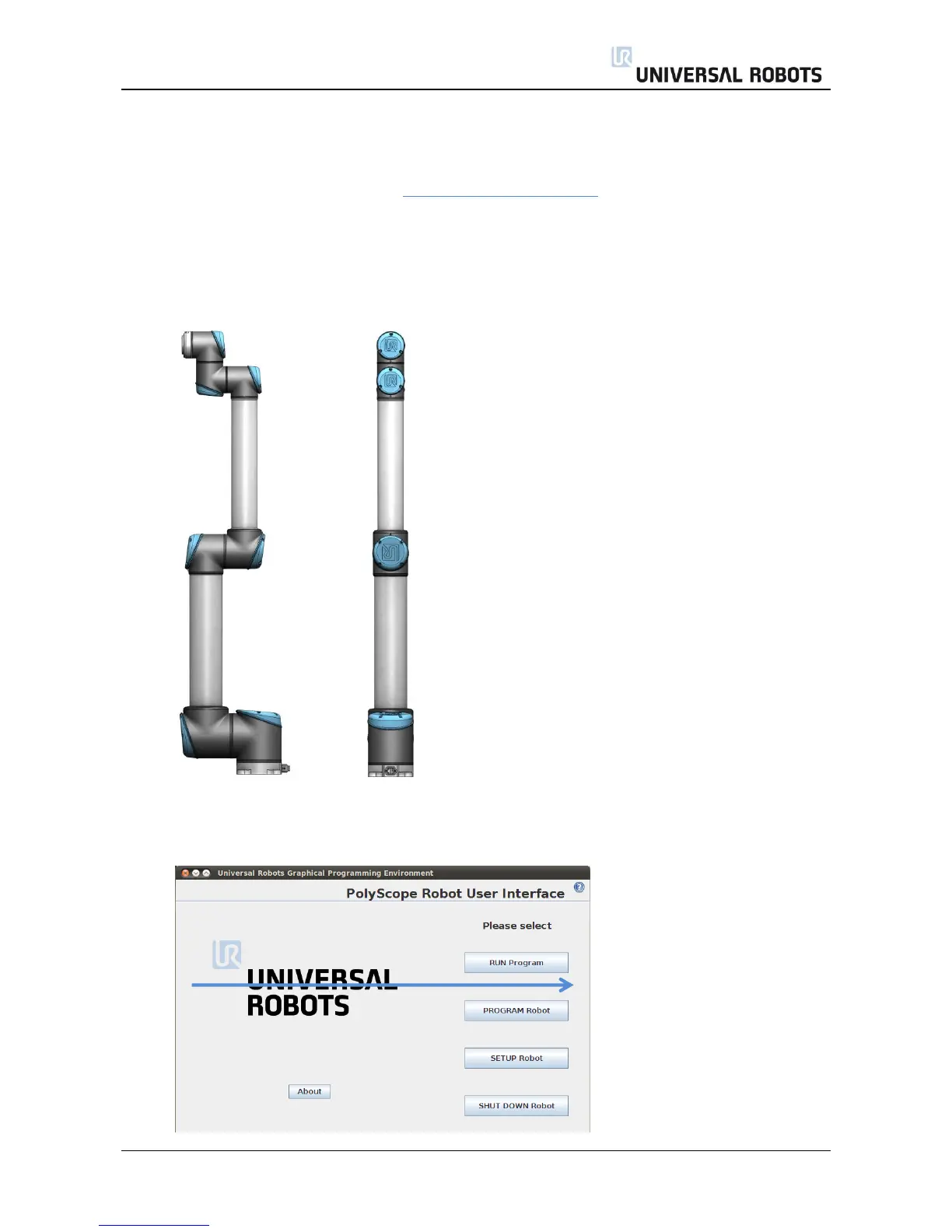
1. Jog robot to HOME position
Illustration shows the HOME position, which is defined as zero position of all joints.
2. Drag a finger from left to right across the UNIVERSAL-sign on main screen of PolyScope.