3.1.18 Joint spare part adaptation
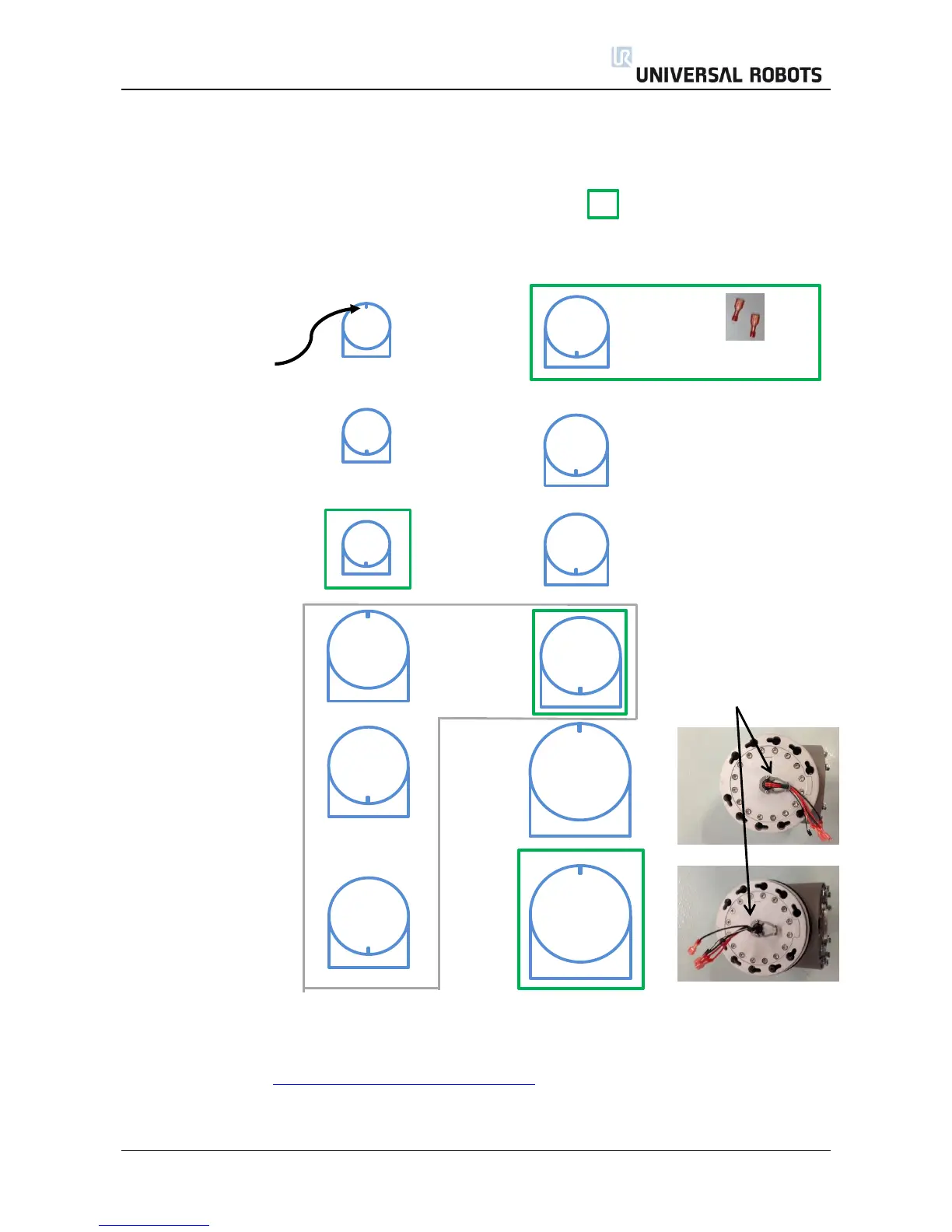
The UR5 and UR10 are constructed of 4 joint sizes and have to be setup on the robot:
Recommended spare joints for UR5 and UR10 are marked with:
Robot: UR5 UR10
Wrist 3: ID =5 Size 1* Size 2
Alignment screw or new wire bundle
Wrist 2: ID =4 Size 1 Size 2
Wrist 1: ID =3 Size 1 Size 2
Elbow: ID =2 Size 3* Size 3
Wires under/over bracket
Shoulder: ID =1 Size 3 Size 4
Base: ID =0 Size 3* Size 4
* Using a joint size in a different location i.e. UR5 base as UR5 Elbow, it may be necessary to change ID,
connect all joints electrically, turn the joint 180 degrees in low level control by using the Move tap's
Up/Down function, before mechanical assemble the robot. The robot then needs to be zero positioned or
dual robot calibrated - 3.1.15 Instructions for calibrating a joint