Description Depending on the circumstances, the robot can initiate three types of stop categories
defined according to IEC 60204-1. These categories are defined in the following table.
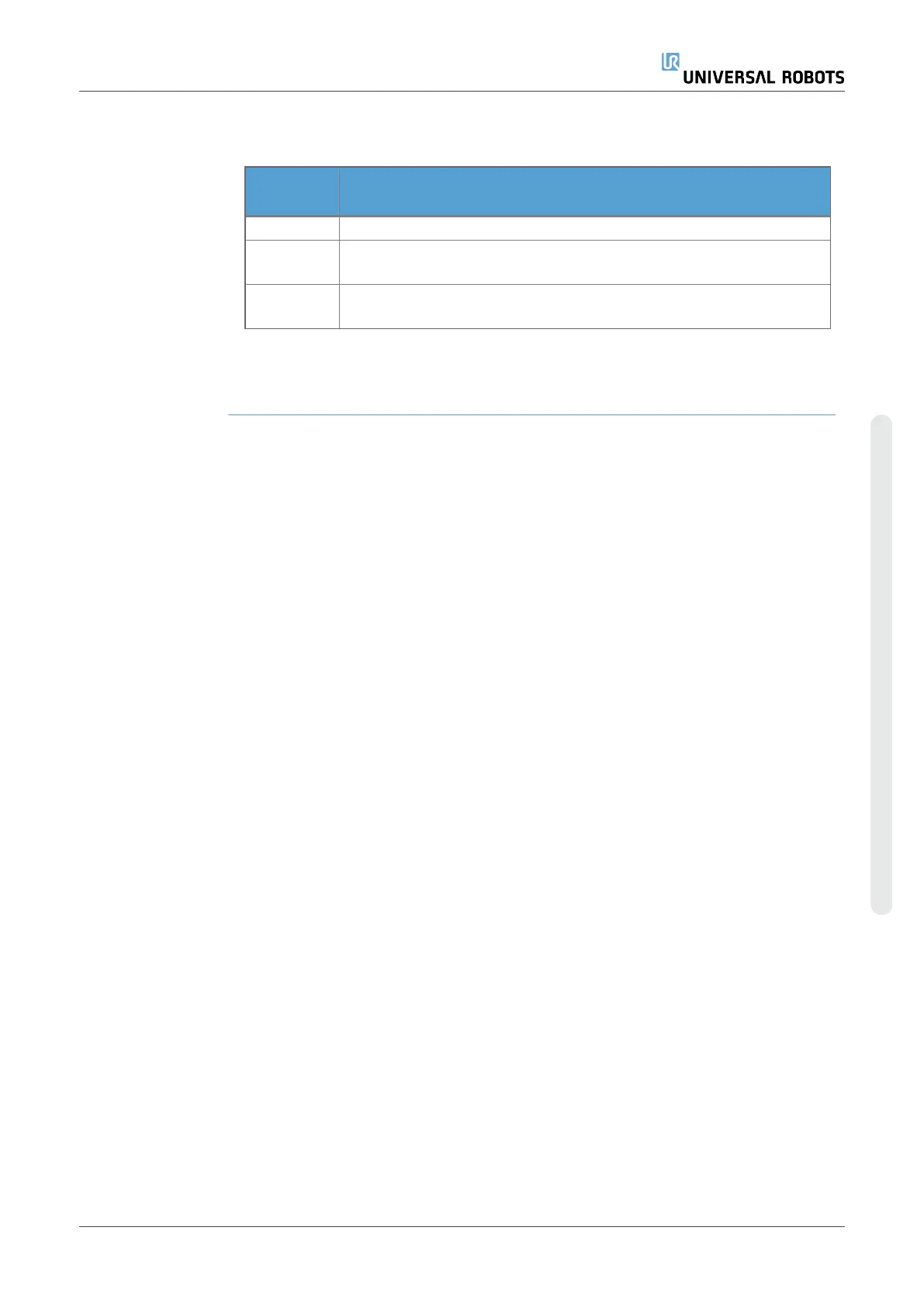
Stop
Category
Description
0 Stop the robot by immediate removal of power.
1
Stop the robot in an orderly, controlled manner. Power is removed
once the robot is stopped.
2
*Stop the robot with power available to the drives, while maintaining
the trajectory. Drive power is maintained after the robot is stopped.
*Universal Robots robots’ Category 2 stops are further described as SS1 or as SS2
type stops according to IEC 61800-5-2.
User Manual 29 UR10e PolyScope X
2.Safety
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.