5.1. Transport Without Packaging
Description UniversalRobots always recommends transporting the robot in its
original packaging.
These recommendations are written to reduce unwanted vibrations
in joints and brake systems and reduce joint rotation.
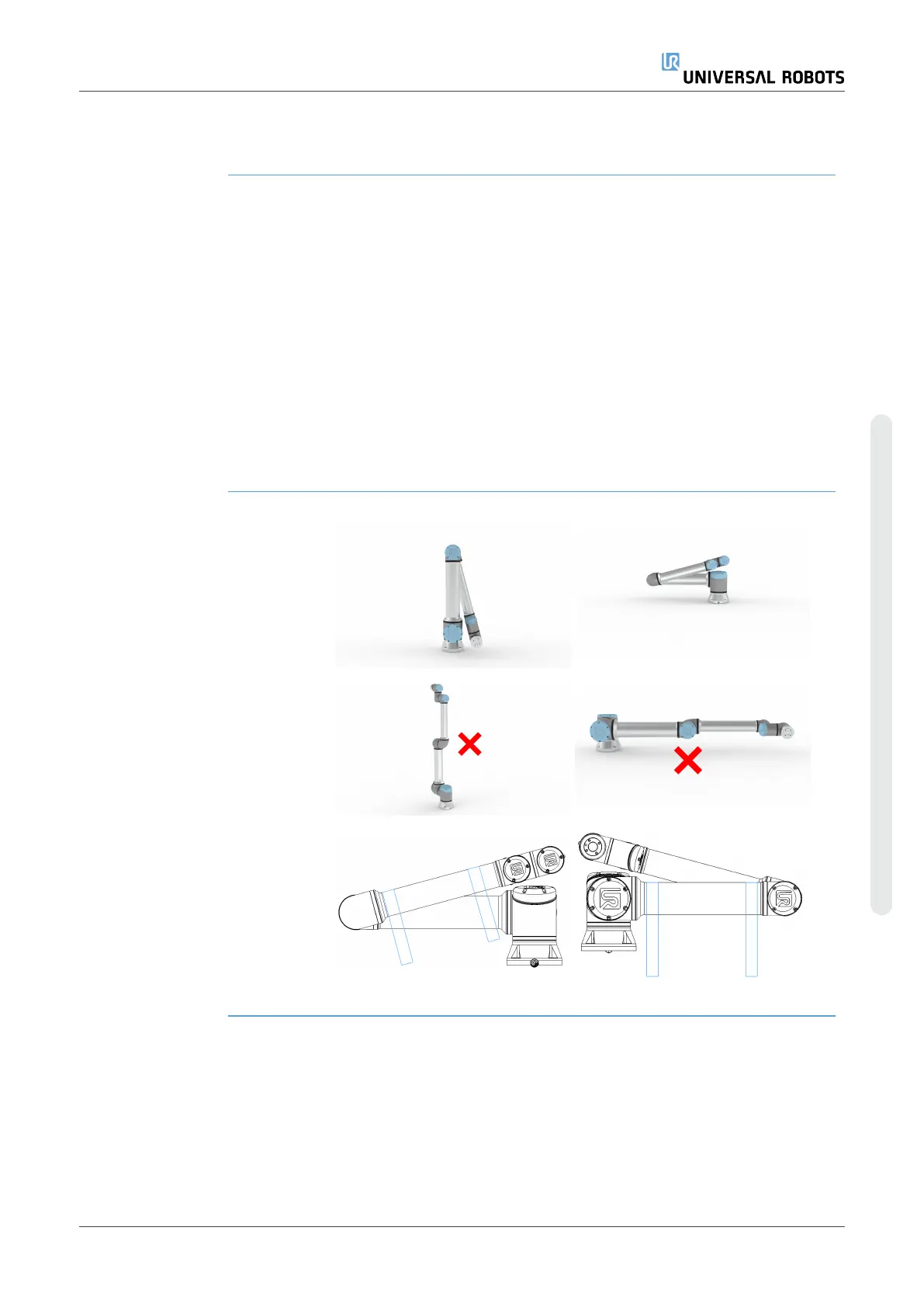
If the robot is transported without its original packaging, then
please refer to the following guidelines:
•
Fold the robot as much as possible – do not transport the
robot in the singularity position.
•
Move the center of gravity in the robot as close to the base
as possible.
•
Secure each tube to a solid surface on two different points
on the tube.
•
Secure any attached end effector rigidly in 3 axes.
Transport
Fold the
robot as
much as
possible.
Do not
transport
extended.
(singularity
position)
Secure the
tubes to a
solid
surface.
Secure
attached
end effector
in 3 axes.
User Manual 77 UR10e PolyScope X
5.Transportation
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.