4.13. Tool I/O
Description Adjacent to the tool flange on Wrist #3, there is an eight-pinned
connector that provides power and control signals for different
grippers and sensors that can be attached to the robot. The
Lumberg RKMV 8-354 is a suitable industrial cable. Each of the
eight wires inside the cable have different colors representing
different functions.
This connector provides power and control signals for grippers and
sensors used on a specific robot tool. The industrial cable listed
below is suitable:
•
Lumberg RKMV 8-354.
NOTICE
The Tool Connector must be manually tightened
up to a maximum of 0.4Nm.
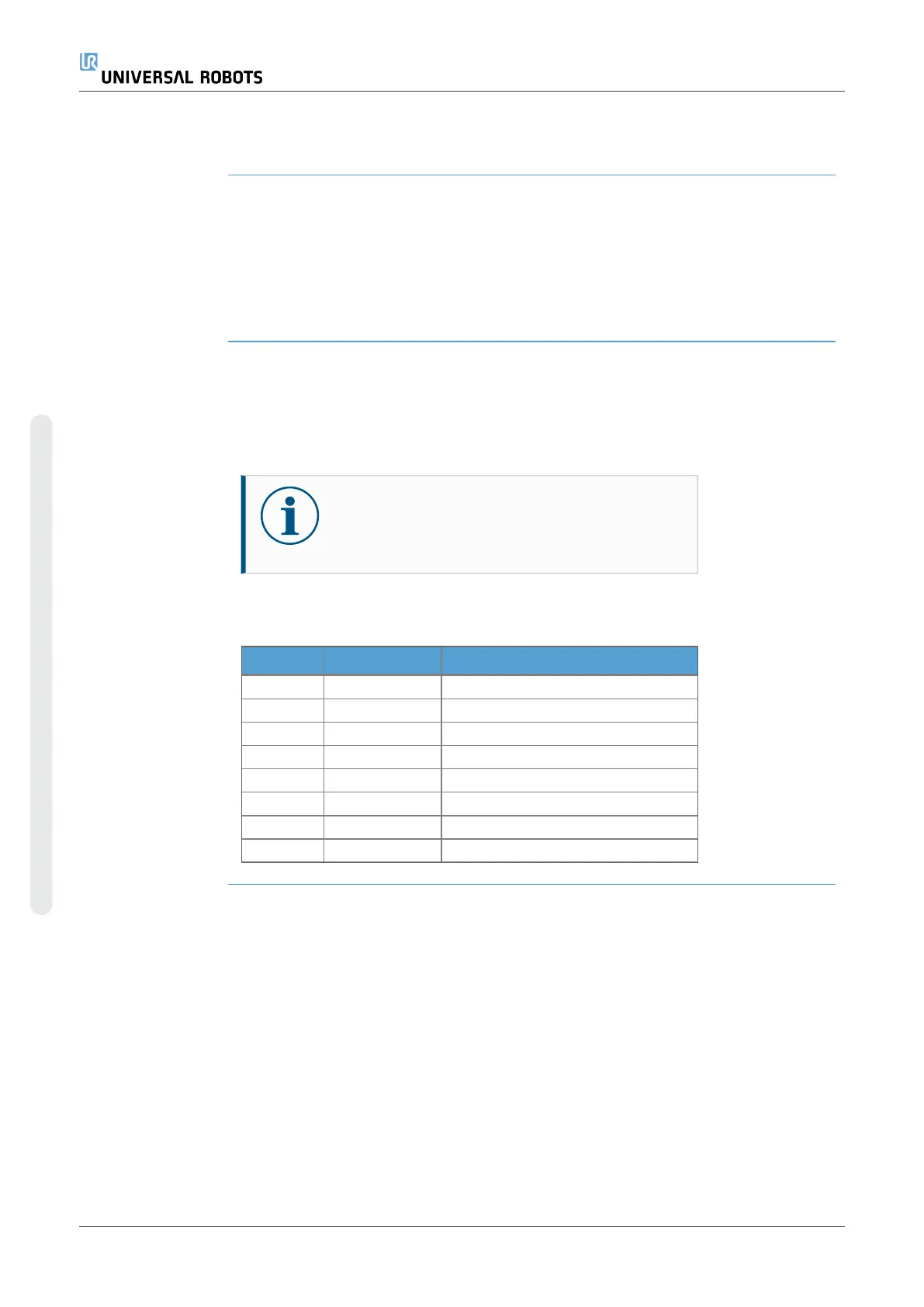
The eight wires inside the cable have different colors that designate
different functions. See table below:
Color Signal Description
Red GND Ground
Gray POWER 0V/12V/24V
Blue TO0/PWR Digital Outputs 0 or 0V/12V/24V
Pink TO1/GND Digital Outputs 1 or Ground
Yellow TI0 Digital Inputs 0
Green TI1 Digital Inputs 1
White AI2 / RS485+ Analog in 2 or RS485+
Brown AI3 / RS485- Analog in 3 or RS485-
UR10e PolyScope X 70 User Manual
4. Electrical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.