Important Safety
Notice
The robot is partly completed machinery (see Declarations
according to EU directiveson page86) and as such a risk
assessment is required for each installation of the robot. You must
follow all of the safety instructions in chapter 2 Safetyon page14.
About the robot
arm
The Joints, Base and Tool Flange are the main components of the
robot arm.
The controller coordinates joint motion to move the robot arm.
Attaching an end effector (tool) to the Tool Flange at the end of the
robot arm, allows the robot to manipulate a workpiece. Some tools
have a specific purpose beyond manipulating a part, for example,
QCinspection, applying adhesives and welding.
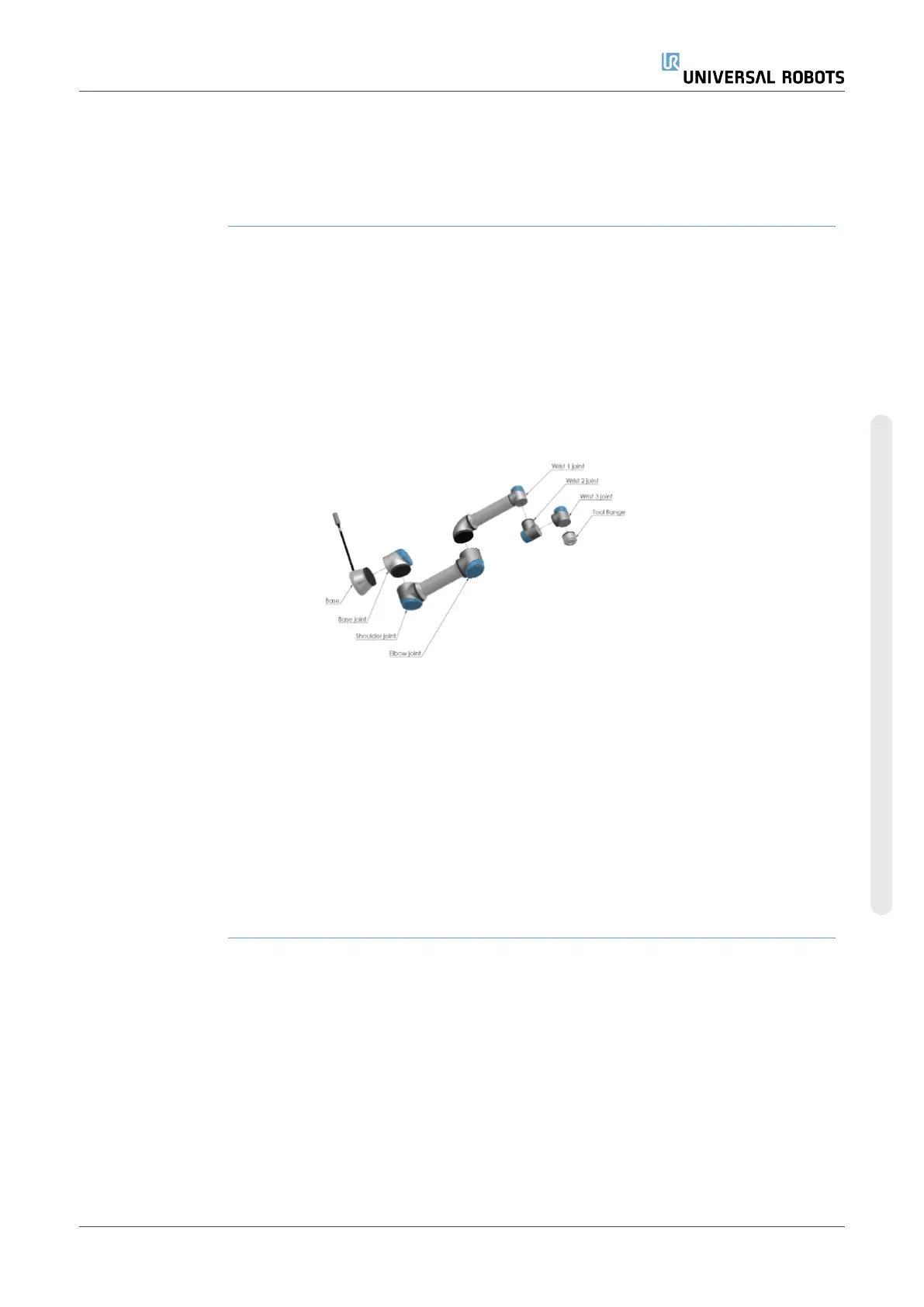
2.1:
The main components of the robot arm.
•
Base: where the robot arm is mounted.
•
Shoulder and Elbow: make larger movements.
•
Wrist 1 and Wrist 2: make finer movements.
•
Wrist 3: where the tool is attached to the Tool Flange.
The robot is partly completed machinery, as such a Declaration of
Incorporation is provided. A risk assessment is required for each
robot application.
User Manual 9 UR10e PolyScope X
1.Preface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.