Steps Please see the link Add Untilon page213 for step by step instructions.
Fixed Waypoint
Description A fixed waypoint is the standard waypoint used in PolyScope.
It is a fixed location, relative to a set coordinate system (the robot’s base by default),
that the robot will move back to when prompted.
A fixed position waypoint is taught by physically moving the robot arm to the position.
You can move the robot with the 16.4 Freedriveon page119 or with the 21 Move
Tabon page314 in PolyScope.
When to use:
•
If the robot must move to a specific location (to move around equipment or
move to a specific location for operation like picking or placing).
•
When you create an entire robot program using fixed waypoints relative to a
location, i.e. relative to the robot base. You can move the robot, and redefine
the location of base of the robot, then the robot program will work on the new
location.
When NOTto use:
•
When you want the location of the waypoint to be dynamic. Fixed waypoints are
static positions and only change when purposely updated or when they’re
relative to a coordinate system.
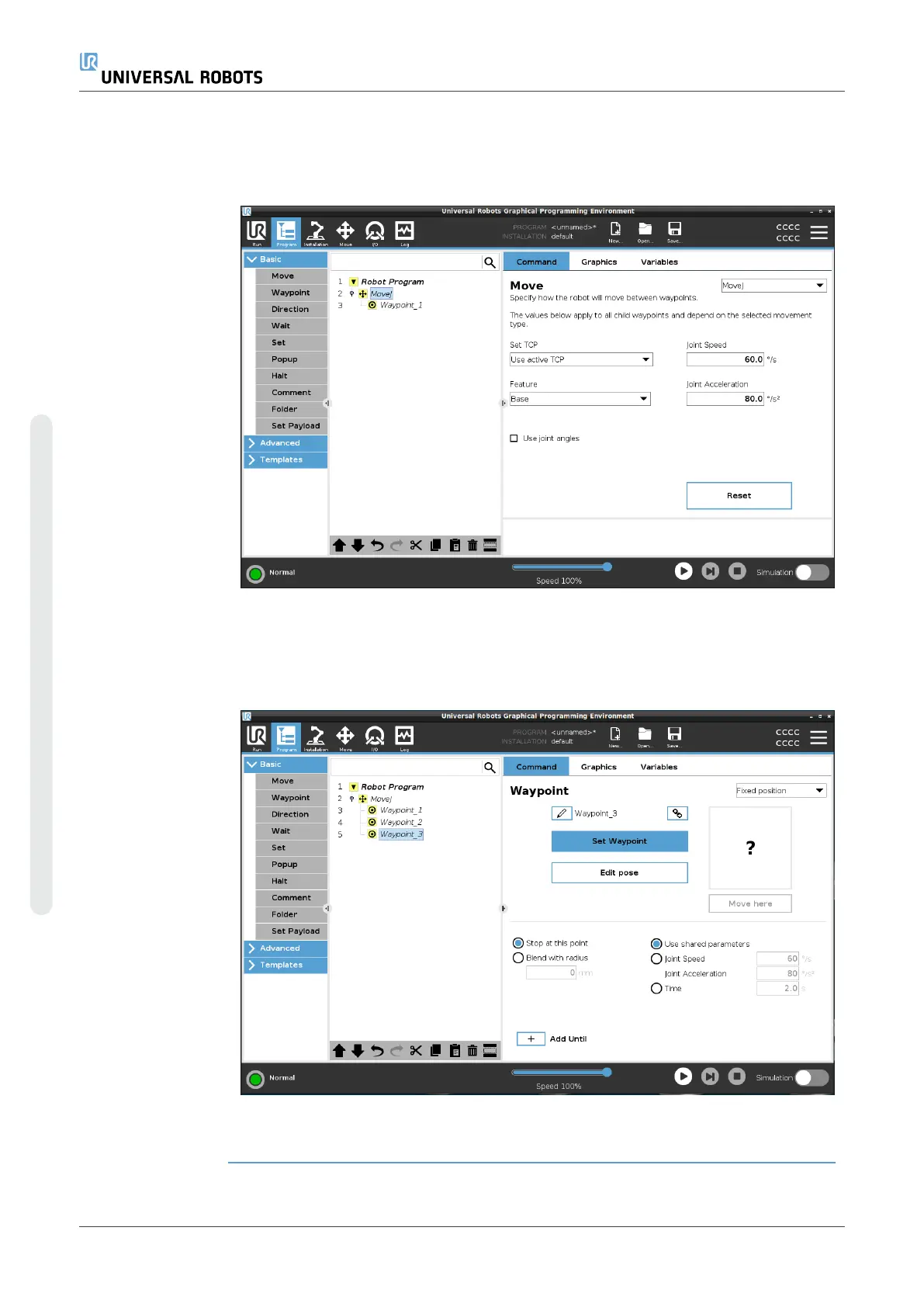
Fixed Waypoint You can add a fixed waypoint to your robot program, when you add a Move command.
There is no difference, if the Move command is a MoveJ, a MoveL or a MoveP.
UR3e 200 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.